仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
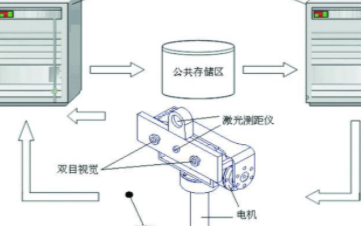
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,
2021-04-13 12:00
为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性
2018-08-24 14:09

机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究
2021-04-13 13:58
仿人型机器人由于具有类人的基本外形,在实际的生活中,能够代替人完成很多工作,因此对仿
2016-11-08 15:50
为了保持在世界上的领先地位,MOTOMAN机器人的产品开发不断创新,始终走在机器人技术研究开发的前列。其成系列的新型机器人大
2021-04-07 11:16
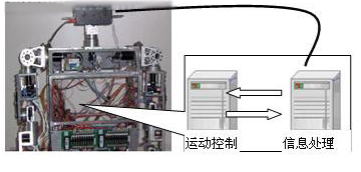
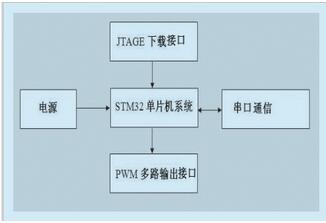
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,
2021-04-13 14:18
在这几年,各大工业机器人制造商,目前都热衷与人机协作,ABB的“玉米”,FANUC的“绿手臂”,KUKA的“伊娃”等等,在人机协作走的比较前的也就数UR了,我们来简单介绍下UR的黑科技,来看下如何用手来教训
2018-01-11 18:14
机器人的诞生地在美国,1962年美国研制出世界上第一台工业机器人,经过30多年的发展,美国现已成为世界上的机器人强国之一
2018-09-04 17:35

随着世界变得越来越自动化,使用常规立式吸尘器清洁房屋感觉苦不堪言。自2002年首台真空机器人上市以来,清洁机器人的功能和可用选项大幅增加。事实上,许多优质
2020-01-23 17:48