发那科码垛机器人伺服电机编码器故障原因 1、发那科码垛机器人电机拆装不规范(敲击电机轴) 2、发
2018-12-15 10:46

F-100iA 是一种柔性,可编程夹具单元。由精确度高,重复性好的伺服变位机组成,可使用离线仿真的数据准确定位夹抓和定位销。IRD是一种简单的机器人涂胶系统,适合大范围涂单一胶品的应用
2018-05-10 14:15
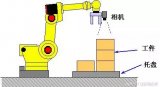
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2018-03-15 11:06
FANUC DeviceNet Interface,基于 Controller Area Network (CAN) BUS,可以简单将产业用传动装置、传感器和 I/O 控制器之间连接起来。DeviceNet Interface,由将 R-30iA 控制器连接到一个或多个 DeviceNet 网络上的硬件和软件构成。
2018-02-05 11:07
1、通电 1)将操作者面板上的断路器置于ON 2)接通电源前,检查工作区域包括机器人、控制器等。检查所有的安全设备是否正常。 3)将操作者面板上的电源开关置于ON 2、关电 1)通过操作者面板上的暂停按钮停止机器人 2)将操作者面板上的电源开关置于OFF 3)操作者面板上的断路器置于OFF
2018-12-15 10:33

程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
2019-03-01 17:00
那TP程序中可以进行不同程序之间的参数传递吗?答案当然是可以!
2020-03-15 16:38

锂电池并联充电时,每节锂电池都应保证均衡充电,否则使用过程中会影响整组锂电池的性能和寿命。常用的均衡充电技术有:恒定分流电阻均衡充电、通断分流电阻均衡充电、平均电池电压
2019-07-12 09:26
电池管理系统(Battery Management System,BMS)是一种集成电路系统,用于监测和控制电池系统状态
2024-05-06 16:52
本文开始介绍了电池管理系统概念与电池管理系统功能,其次介绍了电池管理系统
2018-04-13 09:45