
该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
2024-03-06 14:23
12月2日,上海发那科机器人公司(以下简称上海发那科)的智能工厂三期项目在上海开工。项目总投资约15.8亿元,预计竣工时
2020-12-25 14:19
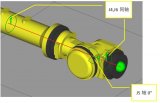
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。
2023-08-05 10:56
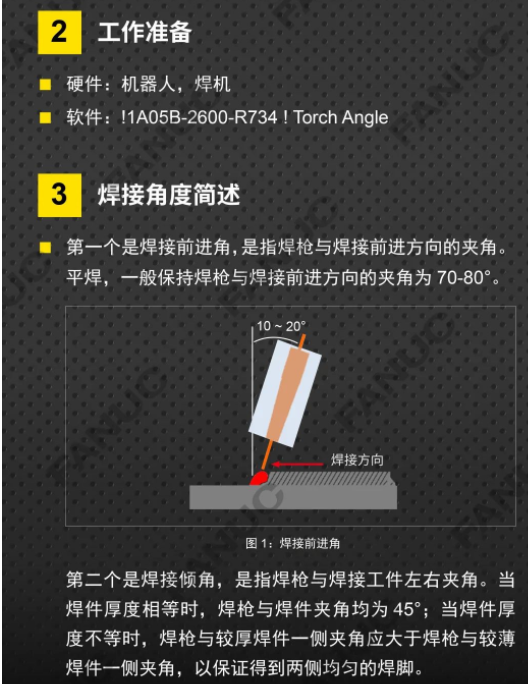
焊接姿态,尤其是焊接时的前进角和焊接倾角是影响焊接质量的两个重要因素。本文介绍的“TorchAngle“功能,机器人可以适时计算出当前的焊接前进角和焊接倾角,适时地显示当前的两个焊接角度,为焊枪角度的调整和焊接工艺优化方向提供数据基础。
2023-07-23 16:04
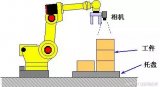
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2023-07-10 14:42
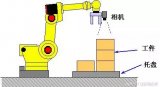
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2018-03-15 11:06
1、通电 1)将操作者面板上的断路器置于ON 2)接通电源前,检查工作区域包括机器人、控制器等。检查所有的安全设备是否正常。 3)将操作者面板上的电源开关置于ON 2、关电
2018-12-15 10:33
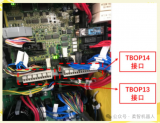
发那科机器人A型控制柜的安全回路接口涵盖了外部急停输入、安全门开关、机器人急停输出以及伺服切断等多个功能,这些接口均通过硬接线进行连接。在操作FANUC
2025-03-17 10:39
此案例是由于客户在某车厂项目中,需要将甲方的发那科机器人介入到自己的Profinet网络系统中,由于机器人采用DeviceNET协议,故选择开疆智能研发的Profien
2025-01-14 10:10

随着科技的不断进步,机器人技术在工业领域的应用越来越广泛,特别是在焊接领域。发那科(FANUC)作为全球知名的工业机器人制造商,其
2023-08-28 14:36