发那科码垛机器人伺服电机编码器故障原因 1、发那科码垛机器人电机拆装不规范(敲击电机轴) 2、发
2018-12-15 10:46
不少人不知道怎么在官网报名公测鸿蒙2.0,那今天就来给大家讲讲怎样在官网报名公测。 方法一: 首先在手机浏览器上搜索“HarmonyOS
2021-06-28 10:38

F-100iA 是一种柔性,可编程夹具单元。由精确度高,重复性好的伺服变位机组成,可使用离线仿真的数据准确定位夹抓和定位销。IRD是一种简单的机器人涂胶系统,适合大范围涂单一胶品的应用
2018-05-10 14:15
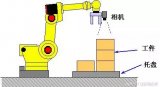
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2018-03-15 11:06

程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
2019-03-01 17:00
那TP程序中可以进行不同程序之间的参数传递吗?答案当然是可以!
2020-03-15 16:38
FANUC DeviceNet Interface,基于 Controller Area Network (CAN) BUS,可以简单将产业用传动装置、传感器和 I/O 控制器之间连接起来。DeviceNet Interface,由将 R-30iA 控制器连接到一个或多个 DeviceNet 网络上的硬件和软件构成。
2018-02-05 11:07
1、通电 1)将操作者面板上的断路器置于ON 2)接通电源前,检查工作区域包括机器人、控制器等。检查所有的安全设备是否正常。 3)将操作者面板上的电源开关置于ON 2、关电 1)通过操作者面板上的暂停按钮停止机器人 2)将操作者面板上的电源开关置于OFF 3)操作者面板上的断路器置于OFF
2018-12-15 10:33
“PyTorch 深度学习:60分钟快速入门”为 PyTorch 官网教程,网上已经有部分翻译作品,随着PyTorch1.0 版本的公布,这个教程有较大的代码改动,本人对教程进行重新翻译,并测试运行了官方代码,制作成 Jupyter Notebook文件(中文注释
2019-01-13 11:53
谈及世界工业机器人,就绕不开以发那科、库卡、ABB、安川电机为代表的四大家族,在亚洲市场,它们同样举足轻重,更占据有中国机器人产业70%以上的市场份额。那么,机器人四大家族的产品都有哪些各自的特点,优劣势分别是什么?
2018-10-28 11:42