本论文以螺旋理论为基础,提出一种系统的结构综合方法。根据各条支链对运动平台所提供的反螺旋约束的线性关系,研究了构成
2017-10-17 14:51
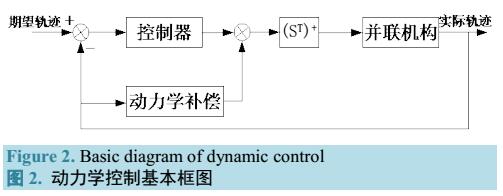
在自主研制的新型五自由度并联机器人的基础上, 设计完成了以微机、无刷直流电机、PCI 接口测控卡为基础的控制系
2021-05-05 23:21
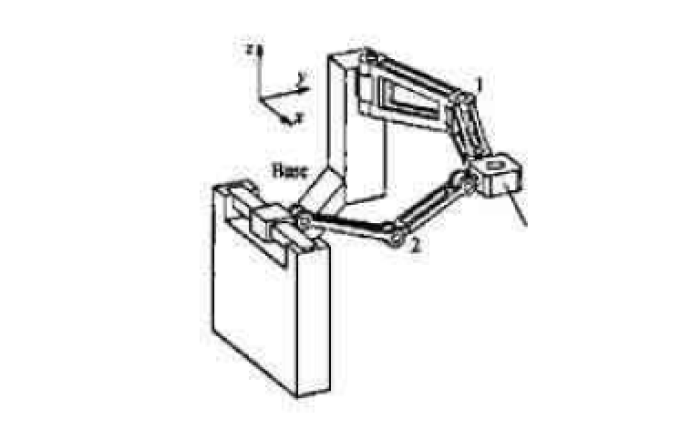
总线数据采集卡为硬件基础,利用Vc++6.0 设计机器人控制界面, 实现该机构的连续轨迹运动。1 新型五自由度并联机器人机构原理研究的并联机构如图1 所示。A1~A4
2019-06-02 08:00
积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并
2018-10-07 10:57
理想的少自由度并联机构的所有分支最好具有完全相同的结构,保持结构的对称,以满足各向同性的要求。以单开链支路为单元,提出了一种新型的对称的少自由度的并联机器人机构。研究结
2017-10-23 16:24
为了提高冗余并联机器人的控制精度,本文针对二自由度冗余驱动并联机器人,基于并联机器人同步耦合误差控制理论,提出了一种非线
2018-04-24 15:47
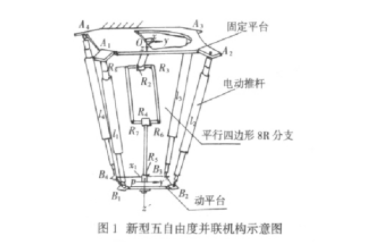
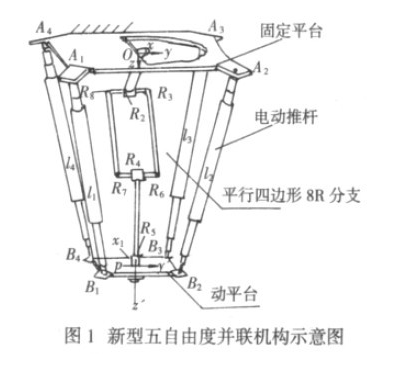
并联机构是由多个并行链构成的闭环机械系统。相对于串联机构,]研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8 为转动副, L1~L4 为电动推杆, 实现伸缩运动。A1A2A3A4 组成了静平台
2019-08-10 04:30
并联机构是由多个并行链构成的闭环机械系统。相对于串联机构,]研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8 为转动副, L1~L4 为电动推杆, 实现伸缩运动。A1A2A3A4 组成了静平台
2019-07-22 04:30
本文示例将实现4自由度并联机器狗行走的功能。
2023-06-18 10:49
本文对一种新型的二自由度并联机器人进行分析。机器人可以放置在一个固定方向的平面刚体。首先详细介绍了机器人的运动结构,然后分析了一些运动的问题,如正向和逆向的运动学,速度
2020-03-26 16:27