主要描述了一种基于FPGA利用Verilog HDL实现的反正切函数计算的优化算法。反正切函数的计算在相位检测,偏振光检测等检测系统有重要的应用。讨论了泰勒展开式法和直接LUT查找表
2010-08-06 14:50
如何以合理的硬件代价来实现高精度浮点超越函数计算,成为了微处理器设计过程当中的一个非常重要的问题。反正切函数的计算在数字信号处理、导航通讯等诸多领域都有着有重
2010-11-02 15:31
本帖最后由 mr.pengyongche 于 2013-4-30 03:14 编辑 sita=_IQatan(i_alfa/i_beta);i_alfa==346i_beta ==785这都是等于的意
2012-03-29 21:09
内容见附件
2016-06-03 20:45
研究了在考虑副瓣情况下的GPS多径码相跟踪误差和载波相位跟踪误差以及不同早减迟间距的影响。基于非相关早减迟延时锁定环和反正切载波跟踪环,得出了由一般形式的误差解
2009-03-03 23:19

通过扩展反电动势的反正切就可以获得电机位置信息,电机的扩展反电动势与电压转速和定子电流有关,在高速重载下因电流变化较大,所以其为扩展反电动势的重要成分
2023-03-15 10:21
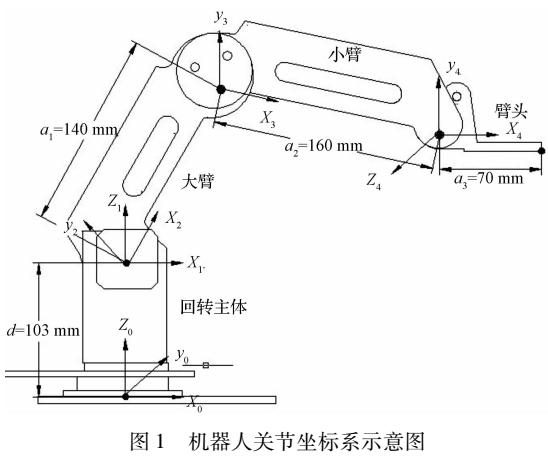
为了获得Dobot机器人的正逆解计算公式、避免解被丢失的可能性和保证角的精度,根据该型机器人的结构特点,运用D-H法建立了机器人的坐标系和运动学方程,进行了正逆运动学的分析,将双变量反正切函数应用到
2018-03-14 15:00
进行数字化和计算反正切后,获得位置信息。HC32L11x采用Crotex-M0+内核,配合成熟的KeilμVision调试开发软件,支持C语言及汇编语言,汇编指令。HC32L11x系列集成了一流...
2021-11-30 19:36
上一篇文章,写到了滑模观测器的设计过程,此过程过后可以得到滑模输出的扩展反电动势。按照反正切函数的原理,只需要对扩展反电动势进行求解反正切即可。如下所示:但是事实上,直接通过滑模观测器输出的扩展
2021-07-13 08:40
唉,想学arm芯片,而且是最基础的lpc2138,用来做工业控制,裸机开发,可是遇到诸多问题啊,首先程序不知道如何入手,看了一些教程感觉没什么卵用,找了一个最基本的led点亮程序,可是TND在编译的时候说打不开“config.h”,我也是醉了,真是不知道怎么入手了。
2015-10-31 21:59