双目标定是双目系统的关键技术,本文对双目系统标定进行理论分析,给出基于变换矩阵的坐标系变换关系。考虑实际情况,提出基于投影法及小波变换的双目系统标定方法,给出
2010-01-07 14:57
立体视觉技术是机器人技术研究中最为活跃的一个分支,是智能机器人的重要标志。双目立体视觉是通过对同一目标的两幅图像提取、识别、匹配和解释,进行三维环境信息的重建。其过程主要包括视频捕获、摄像机定标
2023-07-19 14:18

双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以应用在
2011-04-08 17:51
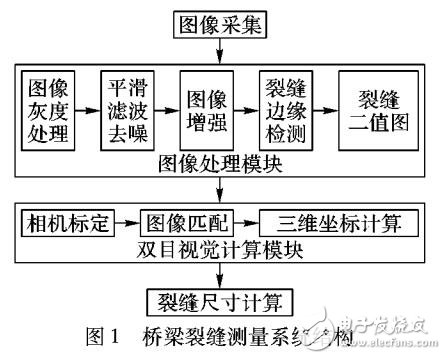
针对国内外桥梁裂缝测量效率低、成本高、精度低等现状,提出了一种基于双目立体视觉技术的桥梁裂缝测量系统。采用相机标定、图像匹配、三维坐标计算等双目立体视觉技术对桥梁裂缝的宽度和长度进行计算,实现了桥梁
2018-01-16 14:59
根据双目视觉传感器的工作原理, 分析了影响测量精度的因素, 表明双目视觉传感器的物体空间坐标与图像坐标之间存在复杂的非线性映射关系, 其数学模型无法用解析式精确地加以
2009-07-10 15:53
双目视觉是利用机器视觉进行障碍物检测的研究热点。针对双目视频不同步,导致立体匹配不精准的问题,提出了一种基于图像处理的双目校准算法。算法首先根据道路的先验特征模型,建立视觉校准的敏感区域,以减小
2015-12-18 16:26
双目标函数支持向量机在情感分析中的应用_刘春雨
2017-01-03 17:41
Xilinx FPGA工程例子源码:基于FPGA实时处理的双目测距系统
2016-06-07 15:07
本文详细介绍了ADS7852的工作原理及其应用,并给出了它与89C51及TCD2901D的连接电路图。说明了双目测距的原理并给出了测距的求解公式。利用ADS7852的特点解决了双目测距中激光光斑
2010-08-03 17:02
对于基于图像的具有手眼或固定摄像机模式的双目视觉伺服控制系统,考虑机器人的运动学特性,在摄像机的内外参数部分未知的情况下,给出了一种直接自适应控制器实现定位
2010-01-11 15:57