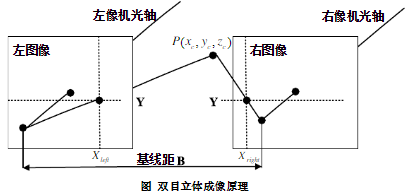
相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
2016-11-05 03:46
审核编辑:彭静
2022-10-31 16:28
双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
2022-10-10 17:25
审核编辑:彭静
2022-10-31 15:13
先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车还是行人,是货车、SUV还是小轿车。
2022-11-24 10:49
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候相机和被测物必然有相对位移,所以拍摄到的图像可能各个角度都会有。
2018-01-23 11:32
由于双目视觉监控系统可以模仿人眼功能,感知三维世界信息,能够得到被测对象到CCD摄像机的深度信息,近几年已开始在需要三维立体检测的领域得到应用。另外,双目视觉监控系统也可用于多场景监控,大大扩展了人
2020-05-07 09:55
未来十年,为了完成从感知+预警到决策+执行的进化之路,高级辅助驾驶系统(ADAS)将接入更多的传感器,实现更为复杂的计算,同时具备更高的安全性。
2016-11-11 10:18
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄
2018-02-08 14:46