根据双目视觉传感器的工作原理, 分析了影响测量精度的因素, 表明双目视觉传感器的物体空间坐标与图像坐标之间存在复杂的非线性映射关系, 其数学模型无法用解析式精确地加以
2009-07-10 15:53
双日视觉是计算机视觉领域的一个重要组成部分。双目视觉研究中的关键技术摄像机标定和立体匹配一直是研究的热点。本文由两部分组成,分别对双目视觉的算法和未标定图
2010-08-14 16:41
对于基于图像的具有手眼或固定摄像机模式的双目视觉伺服控制系统,考虑机器人的运动学特性,在摄像机的内外参数部分未知的情况下,给出了一种直接自适应控制器实现定位
2010-01-11 15:57

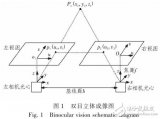
本文以遗视投影变换为依据,针对多视觉传感器检测系统中的双目视觉传感器,建立了双目视觉传感器测量空间三维坐标的模型.事先确定摄像机的部分不易变化的参数,其它参数在摄
2012-03-02 16:02

本内容基于ADSP-BF548处理器设计实现了具有结构光双目视觉的四足可变形仿生机器人系统
2011-08-31 17:42
文章介绍了一种以TMS320DM642 为核心,结合编解码芯片SAA7115 和SAA7105 组成的高速图像处理系统,和典型的电机控制芯片TMS320F2812 为核心的电机控制系统,组成了基于双目视觉的跟踪机
2010-01-18 15:28
双目视觉是利用机器视觉进行障碍物检测的研究热点。针对双目视频不同步,导致立体匹配不精准的问题,提出了一种基于图像处理的双目校准算法。算法首先根据道路的先验特征模型,建立
2015-12-18 16:26
电子开发机器人相关教程资料——全自主机器人双目视觉运动检测
2016-09-06 16:42
全自主机器人垂直异构双目视觉研究,感兴趣的小伙伴们可以瞧一瞧。
2016-09-18 17:15
问题,、提出一种基于双目视觉的投影仪标定算法,将投影仪视为逆向相机,利用一个辅助相机捕获投影于不同位置标定平面,确立摄像机图像与标定平面之间的对应关系,然后利用极线原理得到摄像机图像与投影仪图像之间的对应关
2017-11-06 15:30