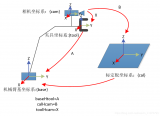
机械手搭载双目相机,手眼标定。
2023-07-11 11:18
机械手搭载双目相机,手眼标定。
2023-04-20 16:32
双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需
2022-10-10 17:25
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33
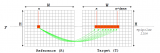
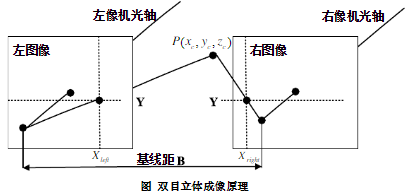
导读 极限校正的实现原理方法以及代码详解。 为什么要做极线校正? 三维重建是通过双目立体匹配实现的如图1,通过匹配空间中点在两个图像中的投影点,再根据三角关系得到P的Z值。 我们双目相机拍摄的时候
2023-07-14 11:03
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候相机和被测物必然
2018-01-23 11:32
最近来看看一些双目稠密匹配的算法。说来惭愧,SGM在航测领域是很重要的算法(当然也是最好的双目稠密匹配算法之一),自己却没有认真读过,只是大致有些了解。
2022-12-15 15:12
双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08
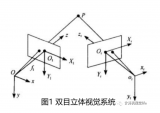
相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
2016-11-05 03:46
线阵相机,是采用线阵图像传感器的相机。面阵相机是一种可以一次性的获取图像并能及时进行图像采集的相机它们都是工业相机,那么
2022-01-29 16:02