卡尔曼滤波(Kalman Filter)是一种用于估计状态的算法,最初由R.E. Kalman在1960年提出。它是一种线性高斯
2024-01-17 10:51
卡尔曼滤波(Kalman Filter)是一种递归的、自适应的滤波算法,广泛应用于估计系统状态和观测过程中的噪声。它最初
2023-12-07 18:26

在很多实际工程问题当中,非线性系统占大多数,而卡尔曼提出来的卡尔曼滤波器是一种针对线性系统的估计
2022-08-12 10:06

一、什么是卡尔曼滤波? 你可以在任何含有不确定信息的动态系统中使用卡尔曼滤波
2023-08-08 09:39
卡尔曼滤波实质上就是基于观测值以及估计值二者的数据对真实值进行估计的过程。
2023-02-16 09:47
在 飞行器姿态计算 中,卡尔曼滤波是最常用的姿态计算方法之一。今天就以目前的理解讲以下卡尔曼
2023-06-14 10:44

本文对于扩展卡尔曼滤波、无迹卡尔曼滤波仅仅做了一些简要介绍,不再想上次的
2024-01-14 14:29

卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。贝叶斯定理是基于条件概率
2023-08-30 10:18
卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。
2023-08-30 10:18
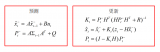
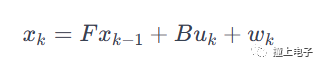
,给出当前状态的最优估计,该算法涉及的核心方程有: 其中,xt为系统状态矩阵;zt为系统观测矩阵(实验结果);A为状态转移矩阵;B为控制输入矩阵;H为状态观测矩阵。 附2、卡尔曼
2025-01-08 10:26