卡尔曼滤波的最终输出是,真实的状态为,令 对误差的平方求最小值,同样可以推导出公式(1-5)到公式(1-7)。因此卡尔曼
2022-12-15 10:45
卡尔曼滤波(Kalman Filter)是一种用于估计状态的算法,最初由R.E. Kalman在1960年提出。它是一种线性高斯
2024-01-17 10:51
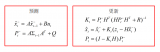
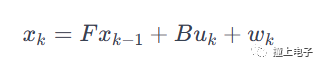
,给出当前状态的最优估计,该算法涉及的核心方程有: 其中,xt为系统状态矩阵;zt为系统观测矩阵(实验结果);A为状态转移矩阵;B为控制输入矩阵;H为状态观测矩阵。 附2、卡尔
2025-01-08 10:26
卡尔曼滤波(Kalman Filter)是一种递归的、自适应的滤波算法,广泛应用于估计系统状态和观测过程中的噪声。它最初
2023-12-07 18:26

在很多实际工程问题当中,非线性系统占大多数,而卡尔曼提出来的卡尔曼滤波器是一种针对线性系统的估计
2022-08-12 10:06

一、什么是卡尔曼滤波? 你可以在任何含有不确定信息的动态系统中使用卡尔曼滤波
2023-08-08 09:39
**卡尔曼滤波**自从1960被Kalman发明并应用到阿波罗登月计划之后一直经久不衰,直到现在也被机器人、自动驾驶、飞行控制等领域应用。基础卡尔
2023-02-13 10:03
**卡尔曼滤波**自从1960被Kalman发明并应用到阿波罗登月计划之后一直经久不衰,直到现在也被机器人、自动驾驶、飞行控制等领域应用。基础卡尔
2023-02-13 10:04
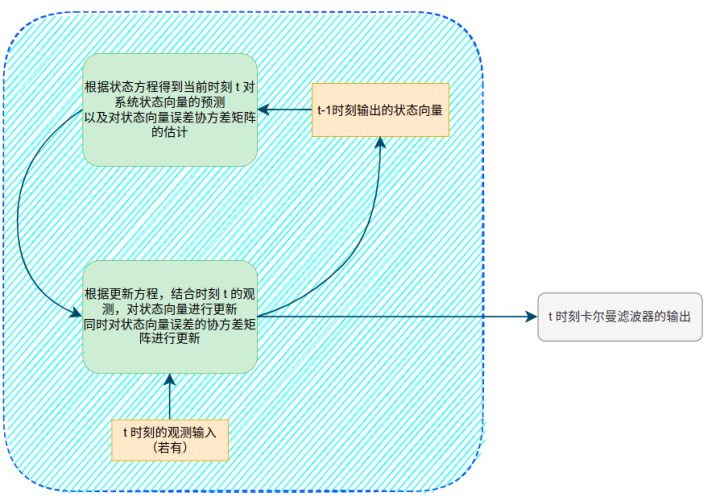
卡尔曼滤波实质上就是基于观测值以及估计值二者的数据对真实值进行估计的过程。
2023-02-16 09:47
**卡尔曼滤波**自从1960被Kalman发明并应用到阿波罗登月计划之后一直经久不衰,直到现在也被机器人、自动驾驶、飞行控制等领域应用。基础卡尔
2023-02-13 10:05