卡尔曼滤波(Kalman Filter)是一种递归的、自适应的滤波算法,广泛应用于估计系统状态和观测过程中的噪声。它最初
2023-12-07 18:26

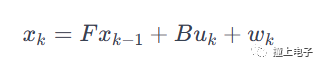
在很多实际工程问题当中,非线性系统占大多数,而卡尔曼提出来的卡尔曼滤波器是一种针对线性系统的估计
2022-08-12 10:06
卡尔曼滤波实质上就是基于观测值以及估计值二者的数据对真实值进行估计的过程。
2023-02-16 09:47

本文对于扩展卡尔曼滤波、无迹卡尔曼滤波仅仅做了一些简要介绍,不再想上次的
2024-01-14 14:29

卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。贝叶斯定理是基于条件概率
2023-08-30 10:18
卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。
2023-08-30 10:18
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。
2022-03-21 13:47

本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与
2018-03-09 08:57

卡尔曼滤波以及其扩展算法能够应用于目标状态估计,如果这个目标是行人,那么就是行人状态估计(或者说行人追踪),如果这个目标是自身,那么就是车辆自身的追踪(结合一些地图的先
2024-04-29 09:46
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。核心过程可以用一个图说明。
2023-05-09 17:30