
本文设计了一种精度高,稳定性好的基于单目视觉的车载追尾预警系统。它利用一种新的边缘检测算法识别前方道路,然后利用阴影检测与跟踪相结合的方法识别前方车辆,接下来根据
2012-10-24 16:00
对单目来说物体越远,测距的精度越低,硬件上的缺点可以通过算法去弥补,近日有两篇关于单目视觉的研究论文曝光,一篇是单目视频
2018-12-01 11:13

双目更多的是基于物理测量,而单目视觉则是基于逻辑推理,通过大量的数据训练,先识别出目标,再根据目标的大小和高度估算距离。因此,单目视觉的漏检率高于双目立体
2023-08-17 09:40
采用单一传感器识别前方车辆易造成误判,为了提高检测准确率,提出了一种基于激光雷达信息和单目视觉信息的车辆识别方法,该方法综合考虑了激光雷达传感器和单目视觉传感器的信息。
2020-11-03 20:56
提出了一种使用低成本无人机实时生成探索地图的解决方案。这依赖于Tello Edu无人机提供的信息,该无人机将图像流式传输到外部笔记本电脑上以进行实时处理。该解决方案运行单目视觉 SLAM来注册图像并创建未缩放的环境地图。
2022-08-29 16:02

伴随着这几年自动驾驶概念的火热,ADAS越来越受大家关注,辅助驾驶作为自动驾驶的早期阶段,在整个流程里扮演着感和知的角色。
2016-12-31 03:55

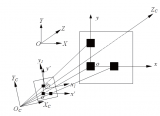
由于摄像机垂直于参考平面 , 所以像素平面到参考平面是等比例缩放的,它们之间只相差一个比例系数。由于参考平面AD 边与现实平面AD 边重合,可以通过实际测量得到AD 边的实际长度。
2023-06-15 17:19
双轮差速驱动搬运AGV 在运动过程中,由于传感器的累积误差、机械传动误差以及装配误差等因素,会导致AGV 通过传感器读数计算的位姿与实际位姿之间产生累积误差。具体表现在短时间内AGV 定位精度下降,随着时间的增加,累积误差会越来越大,最后导致AGV 运动出错。
2021-03-20 09:29
对单目来说物体越远,测距的精度越低,硬件上的缺点可以通过算法去弥补,近日有两篇关于单目视觉的研究论文曝光,一篇是单目视频
2018-11-29 17:25
