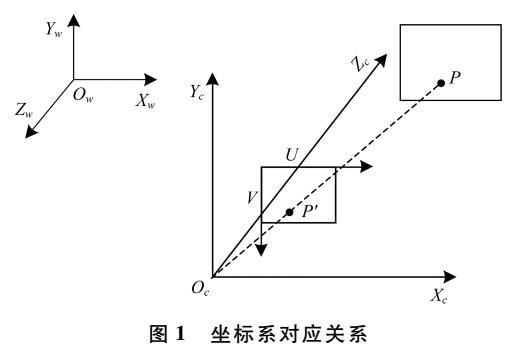
实现单目视觉同时定位与建图(SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其SLAM算法可扩展性强,可以精确逼近真实单目视觉SLAM过程。以方便SLAM算法的
2009-04-15 08:50
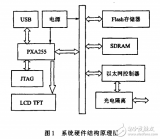
单目视觉车道线识别算法及其ARM实现
2017-09-24 11:38
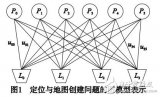
在单目视觉同步定位与建图(SLAM)过程中,由于特征匹配阶段存在误匹配且耗时长,使得机器人初始化速度慢、定位精度不髙。针对此问题,基于概率运动统计特征匹配,提出一种单目视觉
2021-05-27 14:25
单目视觉在棒料全自动上下料系统中的应用_吴高德
2017-03-19 11:41
针对基于模板匹配算法的单目视觉桥吊负载空间定位系统中标识模板旋转、倾斜等造成的匹配性能降低的问题,提出一种结合垂直梯度方向线圆检测与线性预插值的桥式吊车负载实时空间定位方法。该方法通过设置一个附于
2017-12-21 15:15
针对寻线智能车的行驶速度控制模型难以建立的问题,本文以道路复杂度和转向舵机的角度偏差为系统输入量,设计了一种基于单目视觉的寻线智能车速度模糊控制系统。运行结果表明
2010-07-20 14:37
针对寻线智能车的行驶速度控制模型难以建立的问题,本文以道路复杂度和转向舵机的角度偏差为系统输入量,设计了一种基于单目视觉的寻线智能车速度模糊控制系统。运行结
2009-08-19 08:36
随着计算机视觉技术的发展和硬件性能的快速增长,基于视觉的同时定位与地图创建技术及其应用在过去10年里进展丰硕。民用硬件方面,高性能嵌入式计算设备的大量出现和廉价精确成像设备的小型化,已经可以支持在
2018-01-10 09:41
2015-08-26 15:47
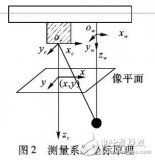
进行处理后得到距离的测量方式。视觉测距是被动测距中一个比较重要的分支,主要分为单目式测距、双目式测距以及结构光测距。双目视觉测距测量精度高,但是算法复杂,运算时间长,特征匹配难,工作环境要求严苛,因此,其研究
2018-02-08 11:49