2015-08-12 17:38
根据机器人控制要求和设计思想,对基于16位单片机最小系统的机器人控制技术进行了研究,分析了行走机构的动力学模型以及电机功率有限和摩擦系数有限对机器人运动的影响,介绍了行
2017-10-18 17:04
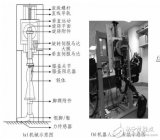
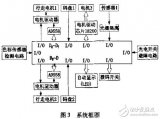
针对假肢自动化测试不可重复性和可能对测试病人造成的不安全问题,本文设计了一种基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统。设计的机器人可在矢状面平面重复两个自由度臀部运动,将跑步
2017-11-10 10:21
2012-10-21 10:44

文件分享(微云)课程镜像说明:机器人工程专业相关课程实践镜像2021测试版(ROS2+Nav2+ESP32+51+……)课程说明:ROS2、机器人控制器、单片机线上课程
2021-11-23 16:36
思路以及论文扫地机器人整体框架1.设计一个小车,用51/32单片机为核心,控制电机。单片机就不多少了,基础的串口通信,中断之类的一定要熟悉,封装成sendrecv函数来发收数据,如果用51的话基本就只能做到随机选择方
2022-03-01 06:50
PIC机器人初学指南:用PIC微控制器搭建机器人双足步行机器人制作指南双足步行机器人进化技术双足步行机器人仿真设计
2015-02-22 07:34
从零九年开始接触机器人研发,不得不说,有必要写一篇长文了。我在接触机器人前,接触过单片机,那时候的单片机还是51、PIC16这种,当时就特别好奇:
2021-08-30 08:37
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业
2015-01-19 10:58
问:什么是服务机器人?答:根据国际机器人联合会(InternationalFederationofRobotics,IRF)的定义,服务机器人是一种半自主或全自主工作的机器人
2021-09-17 07:49