粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不
2023-09-25 11:31

基于步进电机驱动原理,对步进电机驱动方式进行分析,提出了基于西门子S7-1200系列PLC的步进电机位置控制装置的电气系统硬件接线及软件设计。通过测试,该装置能对位置进行精确控制及状态监控,在光伏发电追光系统中可用于光伏板的控制,也适用于PLC运动控制教学实训,在
2023-10-23 14:38
点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合,在获取物体表面每个采样点的空间坐标后,得到的是点的集合,称之为“点
2022-10-19 16:53
什么是双AMR电机位置传感器?它有什么作用?本文就我们在朝着半自动驾驶和全自动驾驶发展期间出现的汽车电气化趋势,尤其是,为了让电子转向助力(EPS)和电子制动系统满足必要的安全标准,以确保无人驾驶汽车的安全性和可靠控制时需要作出的改变提供一些见解。
2020-05-24 12:02
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不
2023-09-21 17:20
功能 FORWARD 从机器人和附加轴的轴角度中计算空间中的笛卡尔位置 (基坐标系)。
2022-10-26 09:47
华为云成立于2011年,隶属于华为公司,在北京、深圳、南京、美国等多地设立有研发和运营机构,贯彻华为公司“云、管、端”的
2017-12-25 15:12
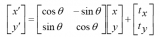
待配准图像与原图像相比存在偏移、旋转、比例等空间变换关系,图像配准就是将不同传感器所采集得到的同一场景的多光谱、多波段或同一传感器在不同时相、不同方位、不同条件下(气候、照度、摄像
2023-10-24 09:27

提到云渲染,大家可能会直接联想到云游戏,实际上二者并不等同。华为云致力于将渲染技术应用于各个行业,目前主要包括实时渲染和离线渲染两大分支,实时渲染的落地场景包括虚拟展会、汽车展示、虚拟
2023-08-24 16:46
伺服电机作为现代工业自动化领域中的核心动力装置,其控制模式的选择对于整个系统的性能有着至关重要的影响。在伺服电机的控制模式中,位置模式和速度模式是最为常见的两种。本文将对这两种模式进行详细的对比分析,以帮助读者更好地理解它们的区别,并为实际应用中的选择提供指导。
2024-06-05 15:02