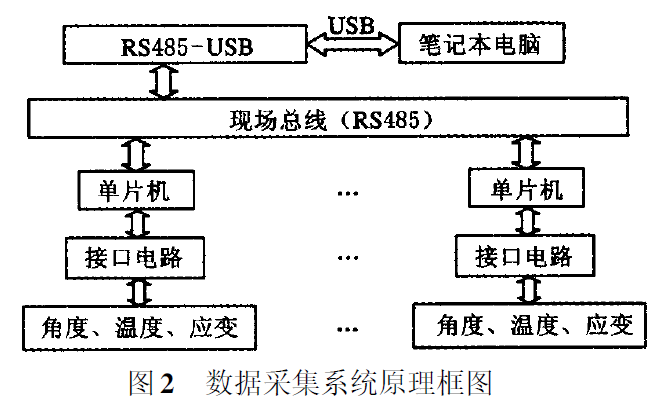
研制了一种关节臂式坐标测量机多参数数据采集系统。在测量机的关节和臂身处分别设置由角度传感器、温度传感器、应变传感器以及单片机组成的智能传感器单元,各传感器单元由RS48
2019-11-28 17:08
正运动学反过来,对于我们的机械臂而言,也就是已知末端执行器的位置和朝向,求每个关节的角度。我们的机械臂的三维运动是比较复杂的,这里为了简化模型更加便于大家的理解,我们对模型进行精简,先去掉下方云台的...
2022-01-20 06:46
/iiwa机械臂运动 - 知乎 (zhihu.com)在CoppeliaSim中,关节有三种不同的模式可以选择:Passive mode:在该模式下,用户可以直接通过设置关节角度(sim.setJointPosito
2021-09-15 08:46
大多数关节臂式测量机通过臂内电缆传输角度信号,导致各关节不能无限旋转。针对该问题,本文设计了一套可用于关节
2009-09-17 10:42
➤ 00机械臂的改动今天(2020-09-28 09:14:46)对新改进的机械臂进行整体调试。机械臂的改动包括有:在肩部关节对于 57HSXXXXEIS一体化步进伺服
2021-09-03 09:24
■ 前言这款双轴机械臂是应用于实验室中进行自动样品转换的执行机构。为了能够在一定范围内将试剂瓶(试管) 完成自动搬运,需要完成对样品的抓取,提升和放下、水平移动(二维) 等功能。使用带有肘关节
2022-02-18 06:01
本菜鸟刚学机器人控制,对于两关节机器人,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
2015-04-29 16:21
关节力矩控制和物理引擎属性关节力矩控制物理引擎属性全局修改和对特定物体的修改joint 参数关节力矩控制vrep中在达到目标速度之前,输出力矩等于设定的最大力矩简单写法python 简洁写法 def
2021-09-15 06:20
0、前言试着推导并实现四自由机械臂的运动方程,在此处使用拉格朗日法进行。系统机构图如下:注:第一个关节是圆柱转盘,其他关节绕枢轴点转动。其中Tm为关节驱动力矩,由电机提
2021-09-15 06:50
——基本——路点,回到命令窗口,设置路点,可以用手动或者点击各个关节按钮,将机械臂移动到合适的位置.4.机械手抓取依次点击结构——URCap——机械爪——EditAction,调整机械爪的状态(抓)。同理设置第二个路点和机械爪(放),点击下方...
2021-09-14 06:38