关节力矩控制和物理引擎属性关节力矩控制物理引擎属性全局修改和对特定物体的修改joint 参数关节
2021-09-15 06:20
机器人关节力矩传感器的分辨力是指其输出信号能够区分的最小力矩值。 一般来说,分辨力越高的传感器能够感知和测量的力矩越小,输出的信号也越细腻。这对于需要精确控制机器人
2023-11-08 16:47
CoppeliaSim笔记(3):关于关节的三种模式参考资料:CoppeliaSim User Manual (coppeliarobotics.com)(含源码)通过关节力矩指令控制LBR
2021-09-15 08:46
杨兴帮表示,外骨骼的目标是让用户穿上后,能获得走路所需的关节力矩(力对物体作用时所产生的转动效应的物理量),同时提供正常的矫正步态,理论上患者不用出力就能正常行走。
2021-01-06 14:27
的气体压力。加压后的气动肌肉输出收缩张力并驱动机构部分的关节转动,因此通过对肌肉压力的控制即可达到轨迹跟踪所需的关节力矩。本系统中采用的McKibben气动人工肌肉为FESTO公司
2012-12-06 15:32
与外部环境,产生相应的虚拟力来“驱使”机器人实现期望的运动。这些虚拟力通过Jacobian 矩阵计算得到期望的关节力矩作为电机的控制输入。其需要计算腿部Jacobian矩阵,但是忽略了腿部的质量,在腿高速运动时误差巨大。又因为它使
2021-09-15 06:23
和低重量的电机 [28],具有足够低的传动比(9:1),以实现本体驱动[4],[23]。这种电机不需要专用的力传感器,因为关节力矩是直接从电机的电流测量值估算出来的[33]。低传动比齿轮结构具有低摩擦
2021-09-15 06:04
作为一家技术驱动的企业,节卡机器人凭借一体化关节设计、力矩反馈、视觉识别、拖拽编程、无线示教等技术优势,已广泛应用于汽车零部件、3C、锂电、食品、化纤等多个行业。
2020-04-07 14:30
导读:国家“十四五规划”中明确提出“研制三维视觉传感器、六维力传感器和关节力矩传感器等力觉传感器、大市场单线和多线激光雷达、智能听觉传感器以及高精度编码器等产品,满足机器人智能化发展需求”。
2022-06-01 11:48
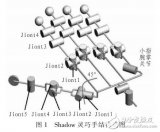
是Shadow仿人灵巧手(英国Shadow公司),借助灵巧手运动学研究的结论,建立动力学模型,根据灵巧手轨迹运动对应的关节角位移、角速度和角加速度,推导出完成运动所需要的关节力矩,建立运动过程和
2017-11-16 14:20