基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求
2023-04-20 10:07
六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的
2011-01-25 00:11
什么是六自由度压电纳米定位台? 六自由度压电纳米定位台可产生X、Y、Z三轴直线运动以及x、y、z 三轴偏转/旋转角度运动的压电平台。
2020-08-10 11:37
六自由度运动平台是典型的并联运动机构,由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六
2020-03-07 16:54

机器人视觉系统的硬件选择直接影响图像采集,图像的质量和后期的处理,并影响整个控制系统的实时性,所以应根据要求和这些硬件性能,严格选择硬件。基于伊瑟特的六自由度机器人视觉伺服控制系统主要包括摄像头、Zynq、存储、显示、通信等模块。
2024-04-24 10:31

近年来,一些端到端学习方法被提出以增强六自由度物体定位的鲁棒性,包括:直接回归几何参数;采用渲染 - 比对来迭代地优化位姿。尽管基于学习的方法具有潜力,但是直接回归法精度有限、泛化能力差
2023-10-16 17:13

、生物科技等微纳操作领域。 H60.XYZTR5六自由度并联机构 H60.XYZTR5系列六自由度并联机构压电纳米定位台,是X、Y、Z、θx、θy、θz
2024-11-21 10:33
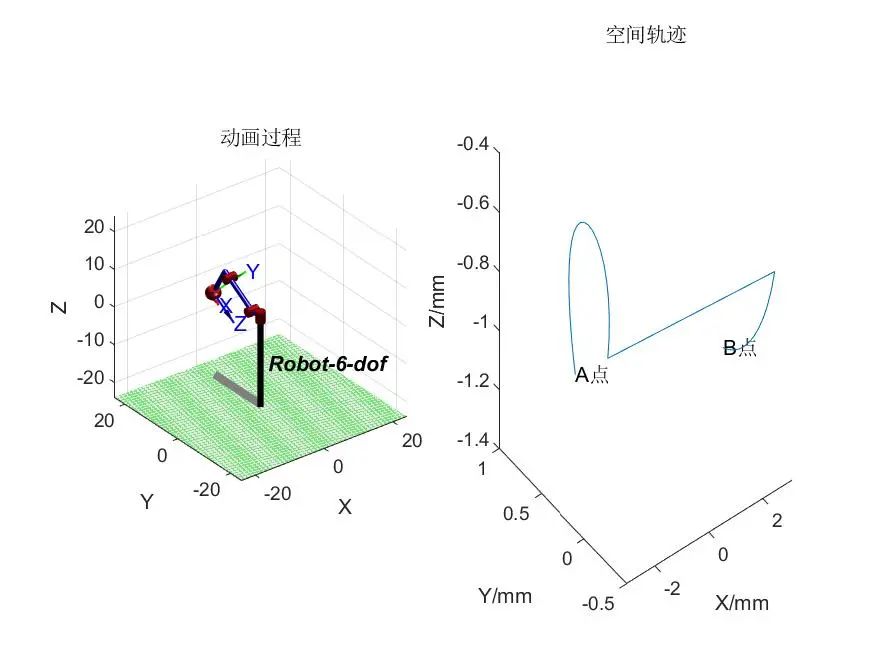
需要重新输入“startup_rvc”回车来启动这个工具箱。 本文所控对象为串联六R机械臂,其具体尺寸参数见于代码中的D-H表。 MATLAB代码 % Modified DH % ABB robot
2023-11-17 16:11

