电子发烧友
1889次浏览
基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求
2023-04-20 10:07
六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的
2011-01-25 00:11

为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后针对机械臂的到达问题、沿曲线运动问题和避障问题, 分别
2012-02-17 16:55
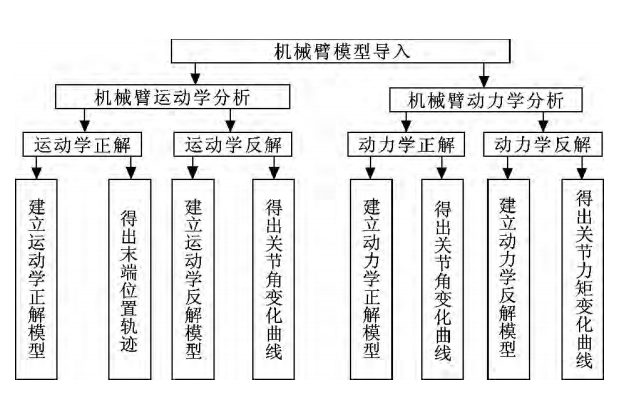
,仿真功能强大,可以在模型中通过改变结构,优化系统参数,在仿真环境中分析结果。利用 SimMechanics 的上述优点,以工业六自由度机械臂 ER10 为研究对象,将 SolidWorks 建立好的机械臂 ER10 模型导入到 MATLAB/ SimMechan
2019-11-12 08:00




