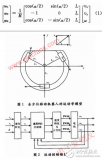
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期
2017-11-01 09:31
构建机器人 | 制作移动机器人 | 构建第一个机器人 | 机器人电子 | 机器人控制器 |
2021-09-01 08:12
的实践经验,来系统的梳理一下什么是移动机器人软硬件系统问题。文中涉及到的开源项目网站地址如下:开源项目网站Handsfree
2021-08-06 06:13
LabView For MyRIO。myRIO组件包中有机器视觉处理模块,多轴联动插补运动解算模块,移动机器人Robotic开发包,内部有全向轮运动解算模块,
2016-08-21 12:20
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的
2023-09-20 06:24
文章目录1. sw_urdf_exporter插件2. 如何导出移动机器人URDF模型想必搜索这个方法的童鞋们对SolidWorks应该再熟悉不过了吧,首先分享一个我一直在用的公众号
2021-08-30 07:28
、餐饮服务行业已经应用到了机器人。不过目前,移动机器人都是使用高质量的机载可充电蓄电池组来给自身供电,但是一般只能维持几个小时,一旦电能耗尽,必须采用人工干预的方式来给机器人充电。如果采用人工充电,那么
2016-01-20 09:39
移动机器人常用传感器
2012-08-20 22:33
PID控制器设计3、距离PID控制器设计四、基于PurePursuit算法的差分移动机器人轨迹跟踪方法1. PurePursuit算法基础2.控制律设计3.基于两轮差速模型的PurePursuit算法
2021-09-01 08:41
作为一个技术宅,我对机器人和单片机很感兴趣。在这里我把自己做过的一款履带式移动机器人的资料分享给大家。欢迎大家吐槽!同时也希望对做机器人的同学有帮助。 该机器人采用ST
2017-07-27 18:28