研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期
2017-11-01 09:31
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期
2019-10-22 07:35

电子发烧友网站提供《一种全方位移动机器人的运动分析与控制实现.pdf》资料免费下载
2023-10-30 09:49
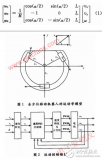
1 全方位移动的定义及常见形式全方位移动机器人是在平面内具有前后移动、左右移动和原地回转三个独立运动自由度的
2017-09-16 09:24
0 引言 目前,全方位移动机器人由于具有出色的灵活性,已经成为RoboCup中型组足球机器人比赛
2010-10-08 10:28
构建机器人 | 制作移动机器人 | 构建第一个机器人 | 机器人电子 | 机器人控制器 |
2021-09-01 08:12
卡尔曼滤波方法估计目标的空间位置和运动参数。 1 目标成像的几何模型 移动机器人视觉系统的坐标关系如图1 所示。 其中O-X Y Z 为世界坐标系; O c -
2019-06-01 08:00
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08
的实践经验,来系统的梳理一下什么是移动机器人软硬件系统问题。文中涉及到的开源项目网站地址如下:开源项目网站Handsfree
2021-08-06 06:13
LabView For MyRIO。myRIO组件包中有机器视觉处理模块,多轴联动插补运动解算模块,移动机器人Robotic开发包,内部有全向轮运动解算模块,
2016-08-21 12:20