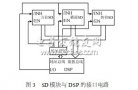
在转动系统中,如何对电机进行高精度控制和小角度转角定位,是一个不易解决的问题。以TI公司的TMS320LF2812型DSP为核心控制器,用CPLD对光电码盘实现倍频,从而通过角速度的反馈
2010-08-03 10:55
计数器
2017-06-09 17:14
光电码盘测速原理如何求解小车速度参数(大小与方向)?测量速度方向的方法根据A、B两相脉冲的超前滞后关系确定电机旋转方向:假定A相超前于B相时,为电机正方向;则当A相滞后于B相,当前电机为反向旋转
2021-09-06 09:18
文“”,介绍了车模提供商在电机同轴上增加HALL传感器获得电机转速的方案,但该方案不能够满足对于速度精度的要求。今天,H车模提供商发送过来四个500线光电码盘样品进行测试,看是否满足竞赛要求,据...
2021-09-01 06:30
机载合成孔径雷达使用陀螺稳定平台使天线在惯性空间保持稳定并跟踪地速方向. 稳定平台需要对分别来自于惯导系统,光纤陀螺,光电码盘的指令角、实际角速度、实际角位置信号进行采
2011-09-13 15:06

目前国内外常用的 转速测量 方法有离心式转速表测速法、测速发电机测速法、闪光测速法、光电码盘测速法和霍尔元件测速法等。通过对现行电机测速方法的研究发现离心式转速表和
2011-08-26 16:16
设计了由半导体激光器、光电码盘、光电二极管、放大保护电路、89S52单片机、显示模块组成的转速测量系统, 给出了定时器初装值的计算过程以及程序主要代码, 最后给出了一部
2010-10-08 15:51
在介绍随动式测量机器人测试系统工作原理、应用领域和总体构成的基础上,阐述机器人本体结构的设计并分析其测试空间,介绍多通道光电码盘数据采集与接口电路的研制,说明基于 FPGA 的多通道码盘信号处理模块
2017-08-31 09:28
#include //请使用者用keil软件打开,才能下面的把乱码转换成中文#include #include /***************************************************************************/void RCC_Configuration(void) //µÚÒ»²½:ÏÈ°ÑAPB2ÇøºÍAPB1ÇøµÄÍâÉèµÄʱÖÓ´ò¿ª{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIOA¿ÚµÄʱÖÓʹÄÜ´ò¿ªRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//¶¨Ê±Æ÷3µÄʱÖÓʹÄÜ´ò¿ª}/*****************************************************************************//*****************************************************************************/void GPIO_Configuration(void)//GPIOAÒý½ÅµÄÅäÖú¯Êý(Ï൱ÓÚ³õʼ»¯º¯Êý){GPIO_InitTypeDef io;io.GPIO_Mode=GPIO_Mode_IN_FLOATING;//IO¿ÚÒý½ÅÉèÖÃΪ¸¡¿ÕÊäÈëģʽ//io.GPIO_Speed=GPIO_Speed_50MHz;io.GPIO_Pin=GPIO_Pin_6;//¶¨Ê±Æ÷3µÄÊäÈëͨµÀΪĬÈÏͨΪGPIOA_6GPIO_Init(GPIOA,&io);}/**************************************************************************//*************************************************************************/void TIM_Configuration(void)//¶¨Ê±Æ÷3µÄÅäÖú¯Êý(Ï൱ÓÚ³õʼ»¯º¯Êý){TIM_TimeBaseInitTypeDef time3;time3.TIM_Period=0xfffe ;//(º¯Êý»á×Ô¶¯¼Ó1£¬¼´0xfffe+1=0xffff.time3.TIM_Prescaler=3;//×¢Òâ:Ô¤·ÖƵϵÊý¶Ô¶¨Ê±Æ÷¼ÆÊý±àÂëÆ÷Òý½ÅÊä³öµÄ¸ßµÍµçƽµÄ¸öÊýÓкܴóµÄÓ°Ïì(Èç¹ûϵÊýֵ̫С£¬Ôò¶¨Ê±Æ÷µÄԴʱÖÓƵÂʹý¸ß£¬±àÂëÆ÷Êä³öµÄ¸ßµÍµçƽµÄ¸öÊýÖµÖ»»áÔÚ¼¸¸öÊý¼äÌøÔ¾£¬ÏµÊýÖµ¹ý´óÔò±àÂëÆ÷Êä³öµÄ¸ßµÍµçƽµÄ¸öÊýÖµ±ä»¯µÄºÜÂý)//ÔÚ±àÂëÆ÷ģʽÏ£¬¶¨Ê±Æ÷µÄÔ¤·ÖƵϵÊýÖµÒ»°ãΪ1»ò3.(º¯Êý»á×Ô¶¯¼Ó1,¼´ÏµÊýΪ2 OR 4)time3.TIM_CounterMode=TIM_CounterMode_Up;//ÏòÉϼÆÊýģʽtime3.TIM_ClockDivision=0;//²»Ê±ÖÓ·Ö¸îTIM_TimeBaseInit(TIM3,&time3);}/**********************************************************//*****************************************************/void IC_Configuration(void)//Â˲¨ÅäÖú¯Êý{TIM_ICInitTypeDef TIM_ICInitStructure;//¶¨ÒåÁËÒ»¸ö±äÁ¿TIM_ICStructInit(&TIM_ICInitStructure);//°´È±Ê¡Öµ³õʼ»¯TIM_ICStructInit()º¯ÊýTIM_ICInitStructure.TIM_ICFilter = 6;TIM_ICInit(TIM3, &TIM_ICInitStructure);}/*****************************************************//************************************************/void led_configuration(void){GPIO_InitTypeDef io;io.GPIO_Pin=GPIO_Pin_4;io.GPIO_Mode=GPIO_Mode_Out_PP;io.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&io);GPIO_Init(GPIOE,&io);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE,ENABLE);}/**********************************************//**********************************************/void usart_configuration(void)//´®¿ÚÅäÖú¯Êý{USART_InitTypeDef usart1_init;GPIO_InitTypeDef io;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);USART_DeInit(USART1);//DeletInitº¯Êý½«USART1½øÐÐÖØÖÃ//USART1_RX PA.9io.GPIO_Pin = GPIO_Pin_9; io.GPIO_Speed = GPIO_Speed_50MHz;io.GPIO_Mode = GPIO_Mode_AF_PP;//¸´ÓÃÍÆÍìÊä³öGPIO_Init(GPIOA, &io); //³õʼ»¯PA9//USART1_RX PA.10io.GPIO_Pin = GPIO_Pin_10;io.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈëGPIO_Init(GPIOA, &io);//³õʼ»¯PA10usart1_init.USART_BaudRate=9600;//²¨ÌØÂÊÖµ9600usart1_init.USART_WordLength=USART_WordLength_8b;usart1_init.USART_StopBits=USART_StopBits_1;usart1_init.USART_Parity=USART_Parity_No;usart1_init.USART_HardwareFlowControl=USART_HardwareFlowControl_None;usart1_init.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;USART_Init(USART1,&usart1_init);USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);USART_Cmd(USART1,ENABLE);USART_ClearFlag(USART1,USART_FLAG_TC);}/*********************************************************//***************************************************/int main(){RCC_Configuration();delay_init();led_configuration();GPIO_Configuration();TIM_Configuration();usart_configuration();TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//±àÂëÆ÷¼ÆÊýģʽÉèÖã¨ÉÏÉýÑؼÆÊý£©IC_Configuration();TIM3->CNT =0; //½«¶¨Ê±Æ÷µ±Ç°Öµ¼Ä´æÆ÷¸³ÖµÎª0TIM_Cmd(TIM3, ENABLE);while(1){ USART_SendData(USART1,TIM3->CNT); //ÏòPC»ú·¢ËͶ¨Ê±Æ÷µÄµ±Ç°Öµ delay_ms(200);}}
2015-07-29 19:48

交流永磁同步电机的速度观测器研究及实现(电源技术指标包括什么)-目前,随者交流永磁同步电动机的广泛应用以及对其驱动器研究的深入,人们对速度反馈精确度要求越来越高。传统光电码盘由于线数的限制已经不能
2021-09-17 10:06