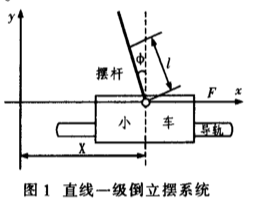
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆
2017-11-27 16:36
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的
2020-05-03 18:11

倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种
2020-05-03 10:29
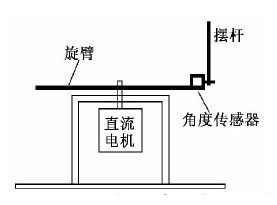
系统工作原理如下:摆杆摆动时,角度传感器检测摆杆的角度,根据角度传感器的输出特性,其输出电压经A/D转换器转换成电压数字量,该数字量与期望的值进行比较产生偏差,通过单片机对该偏差进行处理,即PID控制运算,根据运算结果产生控制信号控制电机和旋臂的转动,使
2019-01-16 15:31
这是一个很简单的机器人,使用一个简单的开关作为传感器,利用倒立摆的机制站站在两个轮子上。
2018-09-10 16:42
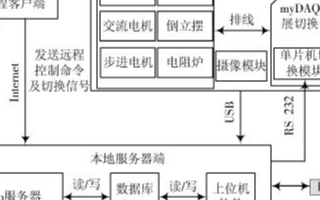
LabVIEW及相关驱动的软件。该主机是使远程客户端和本地服务器端进行通信的桥梁。现场被控端又细分为三部分:信号源扩展及切换控制平台、多对象驱动控制台(直流减速控制台、交流电机控制台、伺服电机控制台、步进电机控制台、倒立摆控制台、电阻炉控制台)、摄像头监控。
2021-03-30 15:57
风力摆系统是一种利用风力作为动力对物体进行位置控制的摆动装置控制系统。 在我国虽然目前还没有系统的成品的销售与应用,但这种控制理论已经应用于方方面面。目前的普遍问题是风力摆系统的自动控制水平不高
2017-11-27 09:18
这是一个自制的太阳能摆。把它放在阳光下,绳子下端系住的小齿轮就会慢慢开始摆动。
2018-08-02 14:29
为什么总是在电路里摆两个0.1uF和0.01uF的电容?
2023-02-03 09:43
机器人手动A11-A4039工具进程激活-A3969摆臂电机启动通过“钳工具”。
2019-11-13 08:54