倒立摆,Inverted Pendulum ,是典型的多变量、高阶次 ,非线性、强耦合、自然不稳定系统。倒立摆系统的稳定控制是控制理论中的典型问题 ,在倒立摆的控制过程中能有效反映控制理论中的许多关键问题 ,如非线性问题、鲁棒性问题、随动问题、镇定、跟踪问题等。
电子发烧友
1.8w次浏览
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆
2017-11-27 16:36
固高科技的环形倒立摆系列产品采用开放的控制解决方案和模块化的实验平台,以旋转运动模块为基础平台,轻松构建环型一级倒立摆,环形串联两级
2011-04-05 22:30
移动的倒立摆!资料来源网络,如有侵权,敬请见谅
2015-11-20 15:39
目录一、倒立摆系统简介二、二级倒立摆模型构建三、二级倒立摆的线性化模型四
2021-09-01 07:14
倒立摆分析、建模与仿真引言倒立摆是机器人学中一个非常重要的模型,火箭、导弹、双足机器人、四足机器人,基本都是倒立
2021-09-07 06:59
旋转倒立摆源程序,有兴趣可以看看的。
2016-07-15 16:03
倒立摆系统是多变量、非线性、强耦合的控制系统。采用模糊控制理论研究二级倒立摆控制问题。运用最优控制方法设计融合函数以降低模糊控制器的维数,减少模糊控制规则数,
2010-12-29 17:29
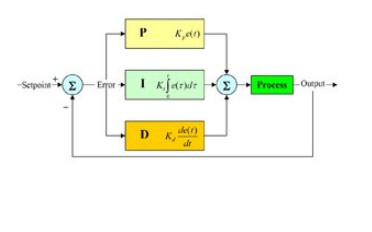
本文档的主要内容详细介绍的是PID参数如何设定调节及倒立摆说明汇总与倒立摆程序免费下载
2019-10-29 08:00
倒立摆的matlab仿真
2018-01-02 20:00
想学习倒立摆,谁有程序借来学习学习
2015-06-09 08:29