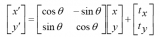
待配准图像与原图像相比存在偏移、旋转、比例等空间变换关系,图像配
2023-10-24 09:27
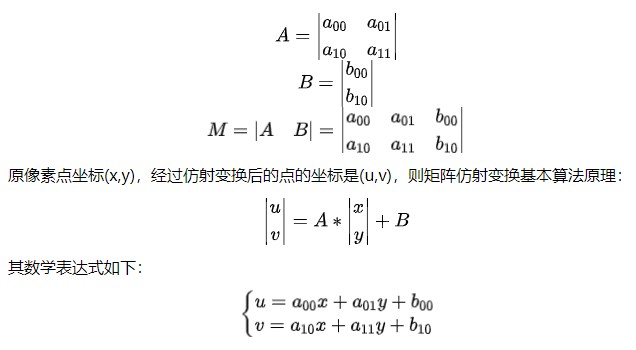
图像的几何变换是指将一幅图像中的坐标位置映射到另一幅图像中的新坐标位置,其实质是改变像素的空间位置,估算新空间位置上的像素值。
2024-03-19 11:11

现有方法往往是:用一个2D特征提取网络提取图像特征;用一个3D特征提取网络提取点云特征;然后根据pixel-to-poi
2023-10-29 17:14

视觉匹配是关键计算机视觉任务中的关键步骤,包括摄像机定位、图像配准和运动结构。目前最有效的匹配关键点的技术包括使用经过学习的稀疏或密集匹配器,这需要成对的图像。这些神经
2024-10-28 09:57

研究图像特征检测已经有一段时间了,图像特征检测的方法很多,又加上各种算法的变形,所以难以在短时间内全面的了解,只是对主流的特征
2020-08-31 10:26
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不一定很精确,但是已经大概是对的了)。
2023-09-25 11:31
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。 在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指图像特征(Features)。
2024-04-19 11:41
标注图像中的物体掩码是一项非常耗时耗力的工作(人工标注一个物体平均需要20到30秒),但在众多计算机视觉应用中(例如,自动驾驶、医学影像),它又是不可或缺的。而现有的自动标注软件,大多基于像素,因此不够智能,特别是在
2018-08-18 11:49
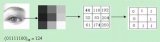
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojal
2018-01-30 10:49
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不一定很精确,但是已经大概是对的了)。
2023-09-21 17:20