仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
仿人型机器人由于具有类人的基本外形,在实际的生活中,能够代替人完成很多工作,因此对仿人型机器人的研究具有实用价值,各国都在投入巨大的人力物力进行研发。
2016-11-08 15:50
对于没有STL指令的PLC,也可以仿照STL指令的设计思路来设计顺序控制梯形图,这就是下面要介绍的仿STL指令的编程方式。
2016-07-28 16:03
目前市面上的西门子断路器与接触器好多高仿品,价便宜不少,而且使用安全性没有保障。下图集是直流断路器,与真品相比较了一下,还真发现了不少问题,二者区别如下:
2019-11-29 09:30
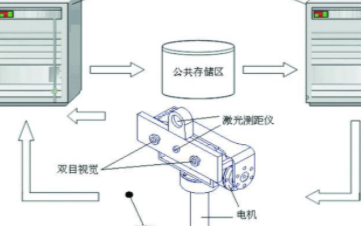
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,然后论述了基于立体视觉的信息处理和头部运动控制,最后通过目标跟踪和物体抓取实验说明了系统的可行性。
2021-04-13 12:00
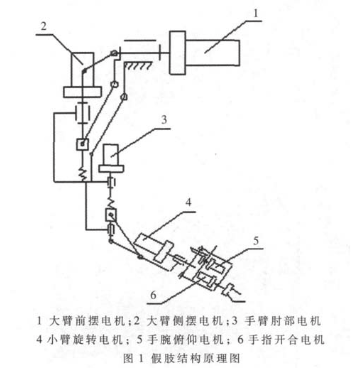
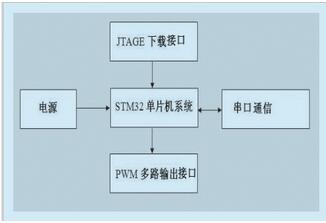
假肢是人体缺损肢体的替代物,用以弥补缺损肢体的形状和功能。本文针对失去整个手臂的情况,设计出一种仿人手臂形假肢的控制系统。使用者可以补偿部分缺失的功能,达到生活自理甚至于可以从事基本劳动,减少身心
2020-04-15 09:36

机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究更是处于机器人课题研究的前沿
2021-04-13 13:58

SDF文件是在VCS/NC-Verilog后仿真运行时将STD/IO/Macro门级verilog中specify的延迟信息替换为QRC/Star-RC抽取的实际物理延时信息,所以如果SDF文件的条件信息在verilog的specify中没有的话,就会报SDFCOM_INF的warning,意思是IOPATH not found。
2023-12-18 09:56

相对于RTL仿真,门级仿真占用的计算资源虽然很多,但是在静态时序检查(STA)工具普遍应用之前,带时序的动态门级仿真几乎可以说是唯一的timing sign-off手段了。
2023-06-08 10:07
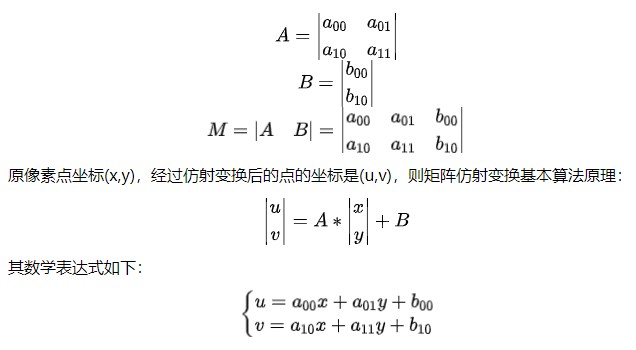
图像的几何变换是指将一幅图像中的坐标位置映射到另一幅图像中的新坐标位置,其实质是改变像素的空间位置,估算新空间位置上的像素值。
2024-03-19 11:11