研究目标设计一款基于STM32的仿生机械手:(1)基于STM32的仿生机械手实现无线控制和有线控制。 (2)实现串口指令控制仿生机械手动作。(3)实现仿生机械手具有多种
2022-01-07 06:55
有很多小伙伴喜欢在没事的时候鼓捣一些机器人什么的,现在给大家分享一个仿生机器人开源资料,喜欢的小伙伴可以看看。六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态
2020-10-10 09:57
本设计主要研究的是小型仿生六足机器人控制系统的开发,其采用自主设计的控制器作为硬件平台。控制器主要有微处理器、驱动模块、电源模块、外围扩展构成。其中驱动模块采用了分时复用的原理,将处理器的 3 路
2020-10-13 09:13
手是模仿人类自然手的机械假手。它可以做人手可以做的事情。这只手是用塑料作为原材料进行 3D 打印的。对于 PCB,将边框直接放置在具有精确尺寸的仿生手上,它有一个 arduino nano 作为控制器
2022-07-04 08:01
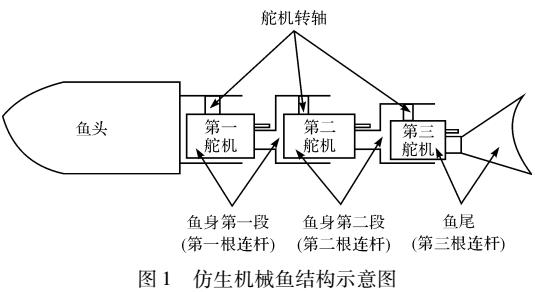
针对仿生机械鱼水下运动控制问题,通过对鱼体外形和运动模式的研究,建立了仿生机械鱼的结构模型,将其简化为3根相连的连杆组成的连杆机构,进行了动力学分析,并对第3根连杆的水动力学运动规律进行了初步分析
2018-02-26 14:42
、包括递送,甚至施工、陪护等方面。随着科学技术的不断发展,仿生机器人的概念越来越丰富,它的应用范围也越来越宽广。或许很快,这些仿生机器人就能进入我们的日常生活中。`
2018-11-21 17:19
摘要:经过大一那次失败之后,我决定暂时停止该项目的开发,转而先去学习那些有关嵌入式开发的基础知识,等以后有能力的时候再去独立完成这个六足机器人。很幸运的是在我大学本科即将结束的时候,我已掌...
2021-07-20 06:14
开关电源因体积小、功率因数较大等优点,在通信、控制、计算机等领域应用广泛。但由于会产生电磁干扰,其进一步的应用受到一定程度上的限制。本文将分析开关电源电磁干扰的各种产生机理,并在其基础之上,提出
2021-10-28 07:50
这只再生机用了三只24号管,分别担任高放,再生检波和低放.由于多了一级调谐高放的缘故,整机灵敏度比一般再生机好.可以收到一些原来收不到的外地台.花点功夫做一做还是值得的.带高放的再生机的制作关键是
2021-05-11 07:29
我在IND4汽车人App可以帮助大家解答汽车电子的相关技术问题,欢迎通过IND4汽车人App向我咨询。在永磁同步电机中,转子磁场中因为有永磁材料构成此磁体的南极和北极,转子磁场的产生机理及在空间
2021-08-27 07:08