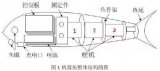
仿生机器鱼实验平台属于教育部和北京邮电大学共同出资支持的一项“国家级大学生创新性实验计划”项目,是一个集光、机、电、流体、智能于一体的实验平台,研究内容包括:仿生机器鱼机械结构的研究,推荐效率的研究以及控制性能的研究
2018-06-08 10:16
机器人概念已经火了好多年了,目前确实有不少公司已经研制出了性能非常优越的机器人产品,我们比较熟悉的可能就是之前谷歌的“大狗”和会空翻的机器人了,这些机器人动作那么敏捷,背后到底隐藏了什么高科技呢?
2018-10-23 10:36
本文以仿生机器蟹为设计对象,提出了基于DSP的机器蟹多层多目标递阶控制系统方案,并对单步行足的软、硬件设计做了详细的阐述,为进一步实现自主式的仿生步行机构奠定了基
2011-08-09 11:26

遥控机械臂套装,本套装可以通过Arduino编程控制一个桌面机械臂,还可以用WII手柄控制机器人哦。
2019-11-29 17:19

机械臂抓取摆放及堆叠物体是智能工厂流水线上常见的工序,可以有效的提升生产效率,本文针对机械臂的抓取摆放、抓取堆叠等常见任务,结合深度强化学习及视觉反馈,采用AprilT
2023-06-12 11:25

首先告诉大家,我们所说的“路径”的是后者——trajectory。我们看一下这两种“路径”在机械臂的世界里有什么区别。
2019-04-20 10:52

这篇文章是来自Automatic Addison的开源项目,已获作者授权转载自github。本项目的主要内容是使用myCobot 280机械臂结合ROS2系统搭建机械分拣站。
2025-01-15 09:22


