利用ADAMS软件虚拟样机技术,设计了液压驱动的四足仿生机器人单腿机械结构。通过分析四足哺乳类动物身体结构及运动特性,设计了仿生机器人的机械机构,确定了机器人腿部自由度配置,建立了仿真模型。根据动物
2018-03-01 11:41
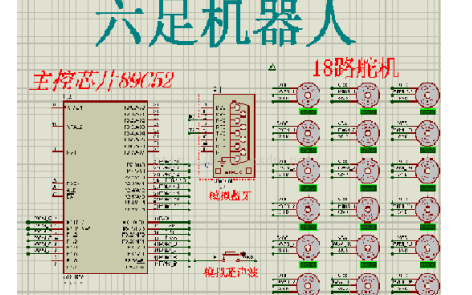
本文档的主要内容详细介绍的是使用51单片机设计六足仿生机器人的详细资料说明。
2019-07-03 17:42

控制系统作为四足仿生机器人最重要也是最基础的组成部分,其性能的好坏直接对四足仿生机器人运动控制效果产生巨大的影响。在机器人研究的早期,控制系统一般采用单级处理器的集中控制模式,利用一台运算速度快
2019-09-27 08:00
2013-06-03 11:22
提到机器人,我们脑海中浮现的通常是金属、塑料材质的机器人。这种机器人是传统机器人的代表,但随着科技的发展,越来越多的机器人
2017-09-20 09:28
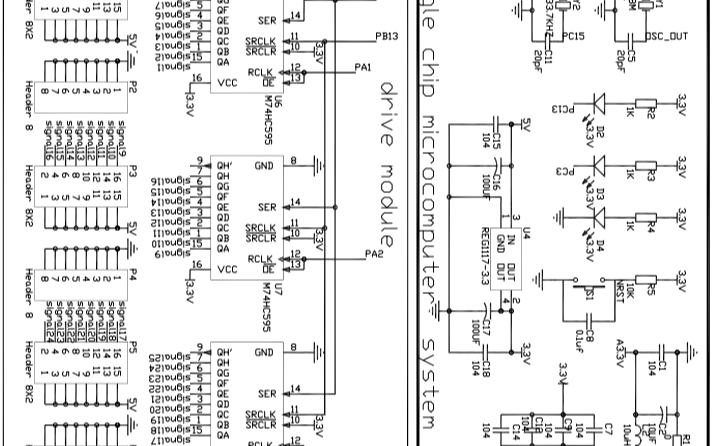
本设计主要研究的是小型仿生六足机器人控制系统的开发,其采用自主设计的控制器作为硬件平台。控制器主要有微处理器、驱动模块、电源模块、外围扩展构成。其中驱动模块采用了分时复用的原理,将处理器的 3 路 PWM 信号扩展成24 路,具有信号质量好、占用处理器资源少的优点
2020-10-13 09:30

摘要:经过大一那次失败之后,我决定暂时停止该项目的开发,转而先去学习那些有关嵌入式开发的基础知识,等以后有能力的时候再去独立完成这个六足机器人。很幸运的是在我大学本科即将结束的时候,我已掌...
2021-12-08 19:36
有很多小伙伴喜欢在没事的时候鼓捣一些机器人什么的,现在给大家分享一个仿生机器人开源资料,喜欢的小伙伴可以看看。六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过
2020-10-10 09:57
本设计主要研究的是小型仿生六足机器人控制系统的开发,其采用自主设计的控制器作为硬件平台。控制器主要有微处理器、驱动模块、电源模块、外围扩展构成。其中驱动模块采用了分时复用的原理,将处理器的 3 路
2020-10-13 09:13
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足
2016-03-24 16:17