电子发烧友
9762次浏览
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现
2019-09-18 06:17
完全自主型仿人机器人成为首个参加RoboCup的仿人机器人 用NI LabVIEW开
2010-02-23 10:56
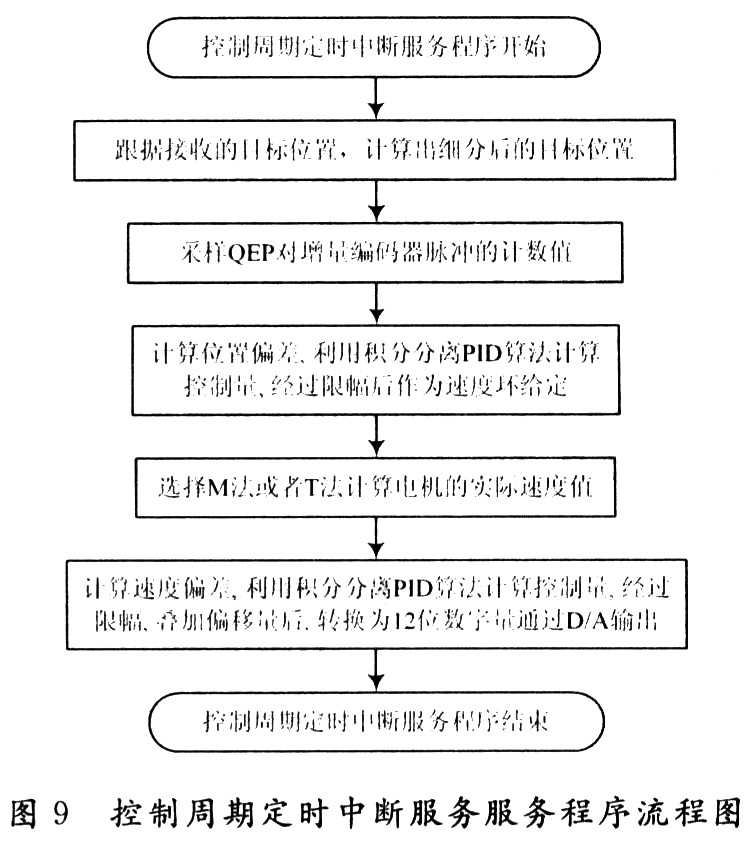
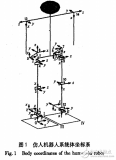
基于DSP仿人机器人关节控制器设计 0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更
2009-11-24 09:36
针对复杂环境下仿人机器人稳定控制的要求,设计了基于MEMS 惯性传感器的仿人机器人足部姿态实时感知系统。同时,提出了基于惯性传感器和足部力传感器信息的系统累积误
2010-01-20 14:09
仿人机器人,灵活度却远超人类,快到极致是种什么感觉?一起来体验一下吧!
2019-05-30 17:43
仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
2009-05-25 15:57
北京理工大学借鉴人类长期进化所具备自然、快速、协调运动机理和灵巧结构特征,创新地研究了仿人机器人的仿生运动规划、控制与系统集成等关键技术,取得了新突破。
2018-03-05 08:58
仿人机器人 THBIP-I及其步态 (HumanoldrobotTHBIP,Iandits@alkinggait) 清华大学 自主研制的仿人机器人 呻 IP--重约 1
2017-09-16 09:14
摘要:针对小型仿人机器人的零力矩点(ZMP)轨迹在线确定问题,设计了一种基于多个简单一维力/力矩传感器的脚底传感阵列系统以及一种距离可调的多孔、双夹板机构,用以安装力/力矩传感器,并实现了脚底传感器信号多级放大及采集软硬件系统。应用CAN总线接口实
2011-02-08 15:52