机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现
2019-09-18 06:17
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用lab
2015-04-22 16:04
完全自主型仿人机器人成为首个参加RoboCup的仿人机器人 用NI LabVIEW开
2010-02-23 10:56
移动这一简单动作,对于人类来说相当容易,但对机器人而言就变得极为复杂,说到机器人移动就不得不提到路径规划,路径
2019-09-06 21:34
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息
2019-07-29 06:09
路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使
2020-12-26 10:49
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径
2021-10-14 14:38
针对现有仿人形机器人造价高的缺点,设计一款低成本的小型双足机器人研究平台。根据人类步行过程及人体生理结构,依据模糊控制与专家控制相结合的理论提出一种简单的双足
2010-12-28 10:44
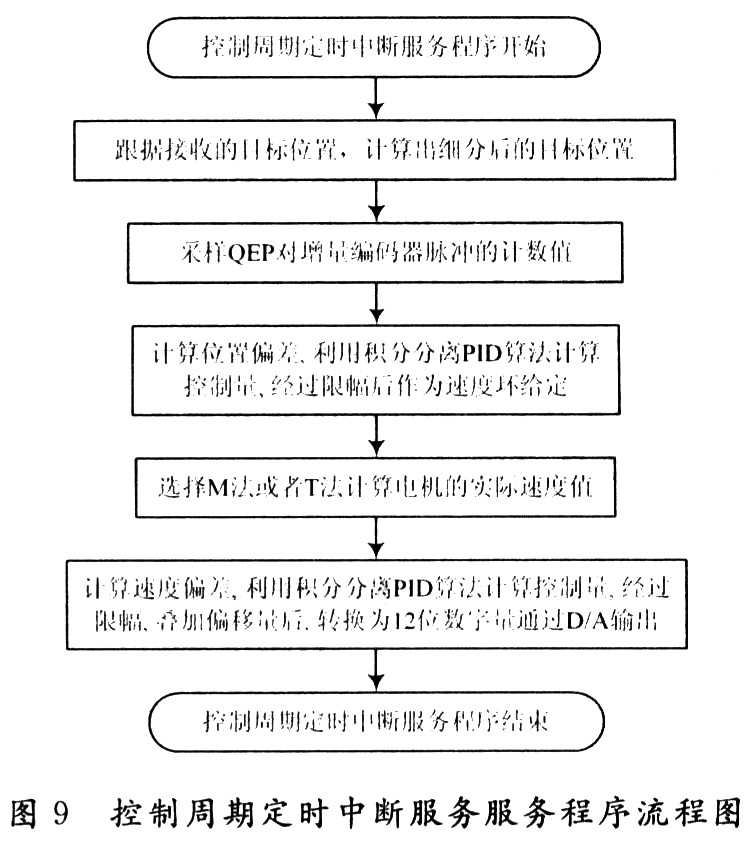
基于DSP仿人机器人关节控制器设计 0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更
2009-11-24 09:36