视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的
2021-04-13 12:00
立体视觉是计算机视觉领域的一个重要课题,它的目的在于重构场景的三维几何信息。立体视觉的研究具有重要的应用价值,其应用包括移动机器
2017-11-17 10:09
仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
随着自动化程度越来越高,机器视觉扮演着越来越重要的角色,传统的2D定位无法解决产品的空间坐标信息,而3D双目立体视觉可提供较高精度的定位。
2018-02-02 10:54
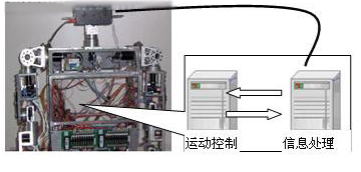
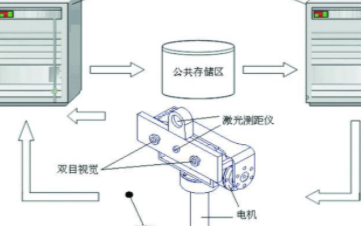
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿
2021-04-13 14:18
立体视觉的采集与显示,定位为立体视觉的采集与显示系统。另一方面,通过在FPGA片上设计的高速图像处理系统,可以根据左右图像的差距,计算出图像的深度信息,也就是物体在环境中相对于双目摄像头的三维坐标。该设计方面可以应用
2018-05-28 09:51

在硬件方面,IBM Research瞄准了一种利用棘波神经网络的立体视觉系统;该公司表示,目前产业界是使用两个传统(讯框)摄影机来产生立体视觉,但从未有人尝试过神经形态技术。虽然以传统摄影机提供立体
2018-06-26 09:51
在Fitz-Thors Engineering Inc.公司向一家一级汽车供应商提供的设计中,配备机器视觉的机器人取代了四台传统机器人。该
2019-01-01 13:44
机器人视觉,计算机视觉,图像处理,机器视觉和模式识别之间有什么区别?知道
2020-01-22 17:20
为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器人足
2018-08-24 14:09