仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
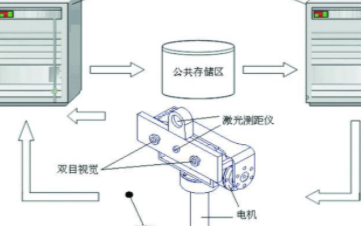
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,
2021-04-13 12:00

机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿
2021-04-13 13:58
为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器人足
2018-08-24 14:09
仿人型机器人由于具有类人的基本外形,在实际的生活中,能够代替人完成很多工作,因此对仿
2016-11-08 15:50
加大对智能机器人科学的基础研究,加强对机器人核心技术的攻关,培育机器人产业市场,不仅能够带动智能机器人
2018-07-07 09:01
机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业
2019-10-15 14:50
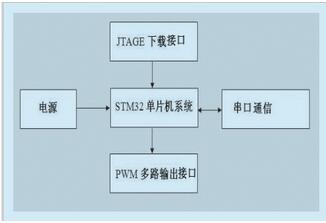
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,
2021-04-13 14:18
在这几年,各大工业机器人制造商,目前都热衷与人机协作,ABB的“玉米”,FANUC的“绿手臂”,KUKA的“伊娃”等等,在人机协作走的比较前的也就数UR了,我们来简单介绍下UR的黑科技,来看下如何用手来教训
2018-01-11 18:14
移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。目标的实时识别与定位是足球机器人在足球赛中精确踢球的前提。文章主要是针对目前足球机器人在视觉系统上所存在的问题进行了颜色模型建立及目标定位算法
2016-09-19 11:18