在导航过程中,传感器的信息至关重要,这些传感器可以是激光雷达、摄像机、声纳、红外线、碰撞开关,但是归根结底,导航功能包要求机器人必须发布sensor_msgs/LaserScan或
2020-05-22 10:32

OTA升级已经不是什么新鲜事,现在大多数物联网终端设备,基本具备这个功能。
2023-09-09 14:22
OTA升级已经不是什么新鲜事,现在大多数物联网终端设备,基本具备这个功能。
2022-07-04 09:08
这是一篇讲解如何实现基于鸿蒙 JS 的简单的每日新闻。
2022-12-26 09:58

实例化终止时,网元侧经常报删除网络失败“delete_network_precommit failed”,在Provider界面检查网络的子网和端口,检查结果为都已经清除,但是手工删除网络同样报错,如下图所示。
2023-09-20 11:05

在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。
2025-06-18 17:43 陕西艾瑞科惯性技术有限公司 企业号
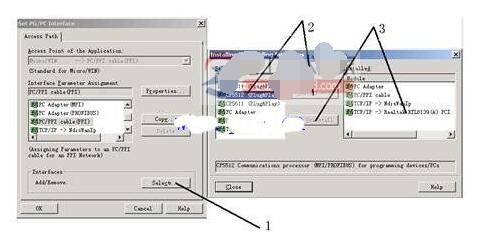
在setpg/pcinterface对话框中,可以使用安装/删除接口对话框来安装或者删除计算机上的通讯接口。
2020-07-15 15:08
惯性导航系统(INS,Inertial Navigation System)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式导航
2018-03-04 09:25
针对移动机器人激光导航定位取卸货过程,发生的货物位置偏差大而导致的取卸货不成功的情况,本文给出了一种解决方法,即视觉辅助运用模板匹配,提取感兴趣区域,边缘检测提取轮廓找中心点来检测货物托盘所在的位置,再通过数据通信转换,将视觉检测结果传输给移动机器人,从而可保证其能够连续稳定地进行取卸货。
2020-02-24 16:04

首先我们先删除刚刚新建的工程模板。
2025-05-06 09:27