无人平台在大范围环境中 实现自 主定位与导航的能力 需求日 益严苛, 其中 基于激光雷达的同步定位和绘图 技术(SLAM) 是主流的研究方案。 在这项工作中, 本文系统概述了 3D 激光雷达SLAM
2022-03-21 16:07

一方面获取传感器采集的各帧数据对应的局部坐标系的位置和姿态是构建地图的关键, 即建图包含了定位问题; 另一方面构建准确的地图又是精确定位的前提, 因此, 定位与建图两者是高度耦合的,可作为一个问题寻找解决方案。
2024-01-18 16:39
Lego-LOAM是基于轨迹位姿方法的回环检测,使用KDtree寻找当前位姿的历史最近位姿,之后把历史位姿作为候选,用ICP算法修正位姿。
2023-01-11 09:12
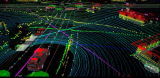
3D激光雷达的出现是为了满足系统对于实时空间感知的需求而出现的,无人驾驶汽车、无人机等自主移动式机器人出于空间识别、自主避障、规划路线的目的,需要一个传感器能够实时对于周边环境进行扫描,从而获知周边障碍物和道路的距离信息,由此
2019-10-28 16:13

LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点云和地图之间执行关联。
2023-08-18 15:45
的杆状物提取方法,该方法在线运行,计算量小。该方法直接对由3D 激光雷达扫描产生的Range图像进行计算,避免了对3D 点云的显式处理,并能快速提取每次扫描的杆状物。
2022-10-09 14:48
激光雷达的物理原理本质上就是“距离=速度*时间”,通过测量激光信号的信号差和相位差来确定距离。相较于发射电磁波的毫米波雷达和发射机械波的超声波雷达,
2023-07-11 16:21
激光雷达系统需要用精确的时间测量来计算距离和生成高分辨率的3D图像。晶振在激光雷达系统中起着关键作用,主要用于提供稳定的时钟信号和高精度的时间基准。
2024-05-29 11:45

所谓雷达,就是用电磁波探测目标的电子设备。激光雷达(LightDetectionAndRanging,简称"LiDAR"),顾名思义就是以激光来探测目标的雷
2023-12-18 17:18

激光雷达(LiDAR)的产业化热潮来源于自动驾驶汽车的强烈需求。在美国汽车工程师学会(SAE)定义的L3级及以上的自动驾驶汽车之中,作为3D视觉传感器的激光雷达彰显了其
2019-05-11 09:20