DG606姿态传感模组是基于MEMS惯性传感技术的超小型、高精度惯性测算系统,该系统内嵌了一颗经过标定的中宏威宇 MotionCore 软、硬件核心,可以在任意时刻、任意运动状态下精确输出载体的三个姿态角。
2022-11-02 11:29
惯性导航,是利用陀螺仪和加速度传感器这两种惯性传感器元件,去分别测出飞机相对于惯性空间的角运动信息和线运动信息,并在给定初始条件下,由计算机推算出飞机的姿态、航向、速度、位置等导航参数的自主式导航方法。牛顿力学定律是
2018-07-17 08:20
惯性器件 惯性导航系统通常由惯性测量装臵、计算机、显示器等组成。惯性测量装 臵由两大核心惯性元器件组成:加速度计和陀螺仪
2020-04-28 11:14
第一代惯性导航技术指 1930 年以前的惯性技术,奠定了整个惯性导航发展的基础。牛顿三大定律成为惯性导航的理论。
2022-07-28 11:25
惯性传感器是一种传感器,主要是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(DoF)运动,是解决导航、定向和运动载体控制的重要部件。
2019-09-12 14:41
惯性传感器是一种利用物体惯性效应来测量加速度、角速度等运动参数的传感器。随着微机电系统(MEMS)技术的快速发展,惯性传感器已经广泛应用于汽车、航空航天、消费电子、工业自动化等多个领域。本文将详细介绍
2025-02-03 14:20
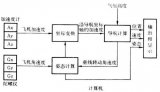
惯性导航(inertial navigation)是一种通过测量飞行器的加速度,并自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。
2019-03-12 09:13
关于惯性测量单元的应用场景阐述
2024-01-19 11:25
关于惯性导航的7大误解
2023-12-04 15:32
惯性导航系统(INS,Inertial Navigation System)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式导航系统。其工作环境不仅包括空中
2018-03-04 09:25