在轮流点亮扫描过程中,每位显示器的点亮时间是极为短暂的(约1ms),但由于人的视觉暂留现象及发光 二极管 的余辉效应,尽管实际上各位显示器并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,不会有闪烁感。
2019-06-28 15:53
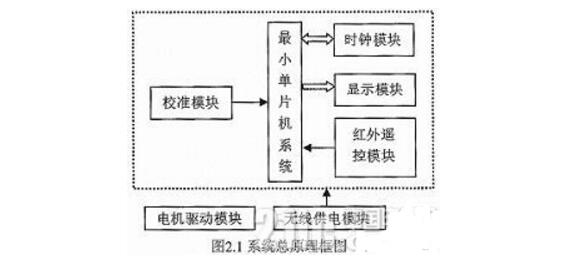
本文主要设计了一个基于单片机的电子旋转时钟。该设计主要依据人眼视觉暂留原理,使用电机带动一定数量的发光二极管旋转,让单片机控制发光二极管在相应的位置点亮,只要点亮时间间隔小于人眼
2018-04-20 08:38
机器人视觉,计算机视觉,图像处理,机器视觉和模式识别之间有什么区别?知道哪一个是哪个会让人感到困惑。我们来看看所有这些术
2020-01-22 17:20
电视机是指根据人眼的视觉暂留特性和视觉心理,利用电的方法来传播光学信息的机器。电视机的基本系统由摄像、传输和显像3部分组成。本文主要介绍uled电视和量子点电视哪个好?
2018-03-19 11:36
数码管闪烁,利用一个布尔变量控制各数码管的显示值,为真(True)是赋对应的数值,为假(False)时熄灭,还是利用一定的时间间隔,在人眼的视觉暂留时间段内,快速的切换熄灭和点亮,可用下面的代码测试。
2019-11-06 16:43
机器人视觉解决方案是我们实现机器人视野的几大挑战。即便变得越来越简单易用,还是有一些棘手的问题。很多因素影响机器人在环境中的视觉,任务设置和工作场所。 这里有9个总结出
2018-11-20 09:56
机器人视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。人类接收的信息70%以上来自视觉
2019-03-30 11:35
数码管的显示用的是74HC138译码器 ,这是一种三通道输入,八通道输出译码器。采用动态扫描显示即轮流向各位数码管送出执行码和相应的位选,利用发光管的余辉和人眼视觉暂留作用,使人的感觉好像各位数码管同时都在显示。
2018-08-07 10:25

抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种抓取方法。各位对机器人识别抓取感兴趣的小伙伴,一定要来看一看!千万别错过~
2023-08-19 17:19
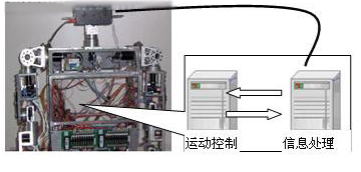
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,其中的视
2021-04-13 14:18