“人形”机器人安装精准的视觉系统,可以具有与孙悟空相媲美的“火眼金睛”,能够更清晰更准确的在复杂环境中辨识物体,甚至在夜晚黑暗的环境中也可以感知到物体的形状。
2018-09-06 17:39

创建动作自然并对各种控制输入做出智能响应的交互式仿真人形机器人仍是计算机动画和机器人技术领域最具挑战性的问题之一。NVIDIA Isaac Sim等高性能 GPU 加速仿真器以及使用NVIDIA Isaac Lab的
2025-01-06 12:31

人形机器人控制系统包括机器人控制器和机器人遥控器两部分。其中控制器以飞利浦公司的ARM7处理器为核心,包含17个舵机控制驱动电路与接口、串口通信调试电路、遥控接口、电源
2021-04-13 15:42

齿轮的历史早在公元前350年,古希腊著名的哲学家亚里士多德在文献中对齿轮有过记录。公元前250年左右,数学家阿基米德也在文献中对使用了涡轮蜗杆的卷扬机进行了说明。在现今伊拉克凯特斯芬遗迹中还保存着公元前的齿轮。
2023-12-14 10:07
在“阿特拉斯”成为“网红”之前,还有一款腿足机器人因酷似“木牛流马”而引发广泛关注,那就是“大狗”机器人。“大狗”的真名为“步兵班组支援系统”,是由波士顿动力公司与美国国防部高级研究计划局共同研制
2018-01-04 10:22

触觉传感器的基本原理是将外部压力转化为电信号,以估算和测量力和剪切力。这其中,关键的技术指标包括空间分辨率、力敏感性、减少零漂和边缘层盲区检测,以及优化处理数据的能力。
2024-01-23 16:16
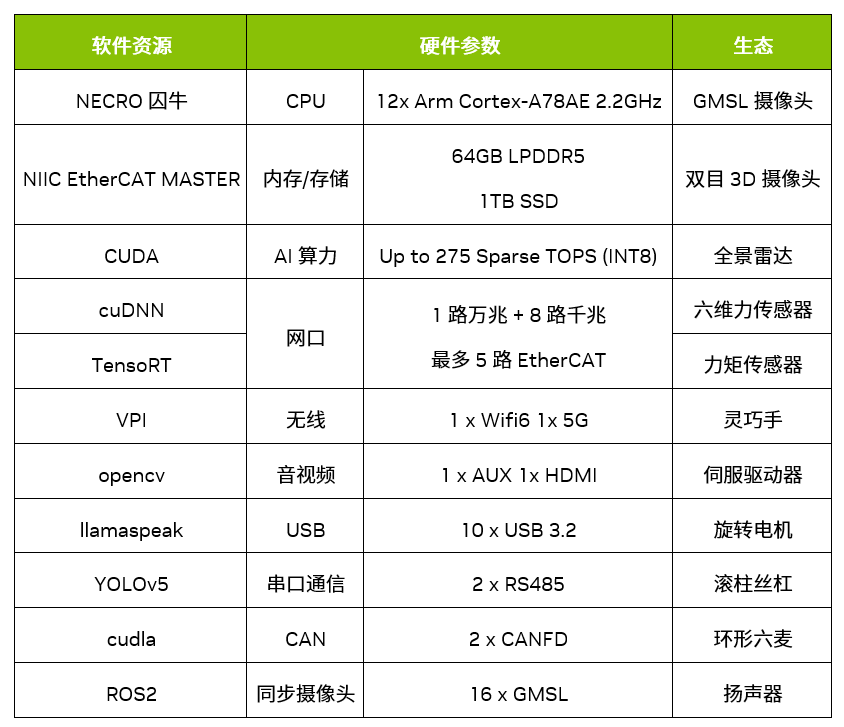
国讯芯微(NIIC)专注于自主实时操作系统和 EtherCAT 协议栈的研发与应用十余年,汇聚了一批业内顶尖的工程师和科研人员,始终致力于为智能制造输出自主可控核心技术产品。
2024-09-10 10:25
新手最好还是老老实实的从小车开始吧。人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的。一个人形
2015-12-23 14:55

韩国著名的Dongbu机器人公司出品的HerkuleX DRS-0101 机器人专用舵机可能是目前市场上最好的一款机器人专用数字舵机。 12kg的转矩,高达300度的旋转角度是
2019-11-21 14:46

本杯士轴承为云台支架、人形机器人、蜘蛛机器人、竞走机器人、机器人关节选配附件,
2019-12-04 14:23