
本研究提出了ExTraCT框架,利用自然语言进行轨迹校正。该框架结合了大型语言模型(LLMs)用于自然语言理解和轨迹变形函数。ExTraCT能够根据场景在线生成轨迹修改特征及其自然语言描述,通过
2024-01-19 10:45
首先要建立机器人的轨迹,作为基础机器人编程轨迹.
2023-08-02 11:03

基于C3-370C的GPS定位及轨迹记录仪!
2014-09-29 20:13

服务机器人、巡检机器人、自动驾驶车辆等SLAM应用,需要进行长时间的定位和导航,但是可能会遇到很多光照变化(甚至天气季节变化)、不同视角提取的不同特征、原先场景的目标已经移除等等很多的环境变化问题,如果处理不好的话很容易引发
2023-12-04 10:01
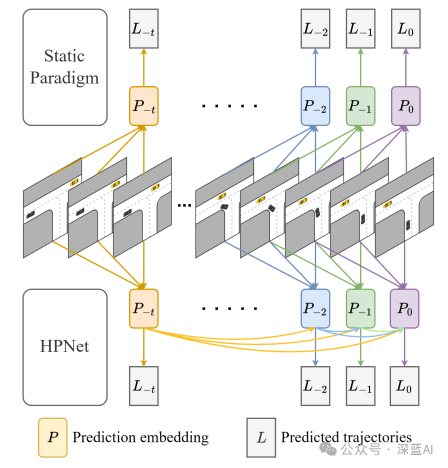
本文提出了一种动态轨迹预测方法,通过结合历史帧和历史预测结果来提高预测的稳定性和准确性。它引入了历史预测注意力模块,以编码连续预测之间的动态关系,并通过三重因子注意力模块实现了最先进的性能。本方法能够生成准确且稳定的未来轨迹,这对于自动驾驶系统落地至关重要。
2024-10-28 14:34
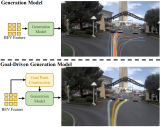
自动驾驶轨迹规划往往采用直接回归轨迹的方法,这种方式虽在测试中能取得不错的性能,可直接输出当前场景下最有可能的轨迹或控制,但它难以对自动驾驶场景中常见的多模态动作分布进行有效建模。
2025-03-18 17:59
在昨天进行的2018云栖大会的机器革命·人工智能峰会上,阿里巴巴人工智能实验室发布了太空蛋和太空梭两款产品,主要面向酒店和医院等场景。
2018-09-21 14:29
运动控制起源于早期的伺服控制,本文与读者分享的是运动控制的定义、运动控制系统的基本架构组成以及在运动控制方面几项运动所需控制轨迹等
2013-04-07 10:47

1. ABB机器人Pdisp 轨迹偏移使用 1)如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)
2018-01-11 12:30
如果处理中断例程的时间短于主程序中制定的轨迹规划,则机器人可不中断而继续运行。
2022-12-26 09:46