基于小波阈值理论的光学图像去云处理新算法?摘 要:分析了部分云覆盖的单幅光学遥感图像经过多层小波变换后,景物信息和云噪音在小波分解系数中的分布关
2010-05-12 09:25
在与激光雷达公司和下游主机厂或者解决方案商的专家交流的过程中,笔者发现,当前激光点云的处理过程中,感知算法人员会遇到很多问题。
2023-03-14 17:50

面向点云处理领域的基础工具课,主要以Python为编程主要语言,介绍Open3D库的使用方法。课程特点简单易用,快速上手点云数据处理,更加侧重于实战,涉及的话题包括点
2023-05-29 09:49

为了探索这些问题的解决办法、来自伦敦大学学院的研究人员们提出了一系列新的点云处理模块,从效率、信息共享和点云卷积操作等方面进行了研究,得到了更宽、更深、更快效率更高的点云
2019-08-02 14:44
云服务器与传统服务器主要区别如下: 传统服务器有产权,而云主机则只是一种服务而已,没有任何产权; 传统服务器是独立的服务器,所有功能由自己完成,而云服务器则是一个集群,他们的功能需要相互之间
2020-03-15 09:26
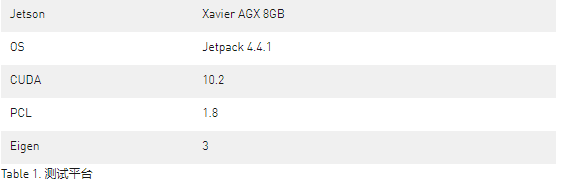
很多Jetson用户在自动化解决方案中选择激光雷达进行定位和感知。激光雷达使用3D点云描绘周围的空间环境。点云可以高精度长距离采样物体表面信息以便于上层应用的障碍感知、绘图、定位和路径规划算法。
2022-04-27 10:53

作为现代世界最令人兴奋的工程项目之一,自动驾驶是许多研究人员和工程师的愿望。这是一个可能从根本上重新定义人类社会的未来和每个人的日常生活的目标。一旦自动驾驶技术成熟,我们 将见证公共交通、基础设施和城市面貌的巨大转变。 早在2009年开始,谷歌开始了一个关于自动驾驶汽车的研究项目,后来创建了Waymo,基于他们早期的技术成功将这一成就商业化。2013-2014年前后,深度神经网络的兴起带来了计算机视觉和机 器学习的革命。目前
2023-06-06 14:42
PointNet++是Charles R. Qi团队在PointNet论文基础上改进版本,其核心是提出了多层次特征提取结构,有效提取局部特征提取,和全局特征。
2023-01-03 10:19