柔性机械臂 刚性机械臂建模方法已经可以有效地求解出机械臂各部分之间的耦合情况,但是对于
2023-11-17 17:12
刚性机械臂 机械臂建模是机械臂控制的基础,控制效果的好坏很大程度上决定于
2023-11-17 17:03

宏集推出七轴都带有扭矩传感器的柔性机械臂,通过类人类触觉、力位控制策略与直观易用的打磨app,实现均匀一致的打磨效果,打破“被动柔顺”方案的不可控性与精度限制,使表面精
2024-01-03 13:36
,不同关节间采用不同方向的铰链布局,以此实现机械臂在不同方向的弯曲运动;多关节间的协调变形可以实现机械臂的伸缩运动。驱动部分采用电磁阀控制的气缸,利用气体的可压缩性实现部分柔性
2023-02-06 11:02
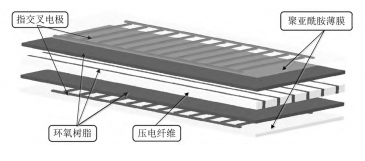
搭建MFC致动的柔性臂构件试验系统,测试得到了柔性臂构件的末端变形位移与MFC致动器驱动电压之间的双极性非对称迟滞特性。
2025-03-01 10:40
),考虑选用阻抗控制(此时,接触环境建模为导纳,即输入容许范围的接触力,反馈位移给机械臂); 而对于低刚度环境,期望机械臂体现出高阻抗行为(在给定接触力的前提下,保证较
2023-11-22 15:59

使用语音控制myCobot机械臂运动
2023-03-17 18:13

1.背景介绍 机械臂的位置控制是机械臂最重要的功能。机械臂的位置控制精度也是研究者及工程师一直关注的问题。本文梳理下机械
2024-03-05 08:43

使用一个桌面型的六轴机械臂,在机械臂的末端安装一个摄像头,来进行 人脸识别和跟踪 的一个功能。该功能分为两个模块,一个是 人脸识别模块 ,另一个是 机械臂的运动控制模块
2023-02-10 16:07
