。里程计提供ROS需要的速度信息,陀螺仪提供加速度方向等信息给 ROS,再加上连接到树莓派上的激光雷达,ROS就可以进行SLAM制图和导航了。下位机接收到ROS下发的速度信息后,转换成电机的PWM信号和舵机的PWM信号进行方向和速度控制。本篇就介绍
2023-05-09 11:44
最近在做一个项目。上位机用可以联网的笔记本,里面装有ububtu系统,打算在里面安装一个ROS(机器人操作系统);下位机采用一个Beaglebone black开发板,
2017-10-01 10:50
上位机与下位机通信的具体步骤是什么?
2012-12-17 18:50
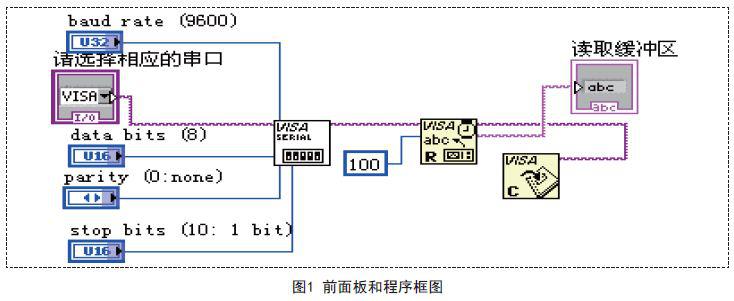
首先利用单片机STC89C54通过串口发送“你好,LabVIEW”,LabVIEW将单片机发送到数据进行显示。通过这个实例来了解LabVIEW的串口通信设计。
2018-09-17 08:25
怎样通过python去实现上位机和下位机的通信呢?有哪些操作流程呢?
2021-11-16 06:48
[tr=transparent]本文以51单片机控制四路开关量输入/六路开关量输出为例,设计了一个简单的上位机下位机
2018-07-13 05:11
本帖最后由 zhgxzc 于 2015-5-23 14:25 编辑 实现无线控制小车,对串口通信不太懂,插上无线发射器不是只有一个串口么,怎么会有com1、com2 ,我现在上位机做好了,如何实现与
2015-05-20 23:44
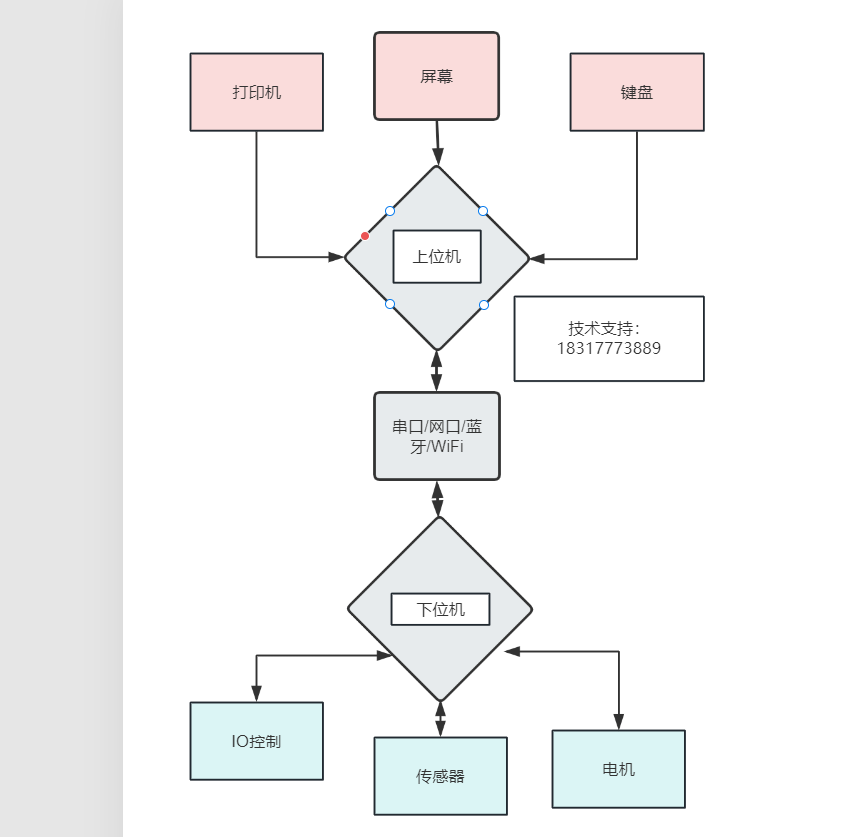
上下位机通信技术全景解析 在工业控制与自动化系统中,上位机(监控/管理端)与下位
2025-07-11 15:56
1.上位机与下位机上位机,与下位
2022-01-14 08:52