新型三自由度碟型磁浮马达特性量测与改善本计划将针对本校电机系所研制之新型三自由度碟型磁浮马达进行特性量测与改善。此碟型磁浮马达是由具有18 个E型硅钢片之三相交流
2009-11-17 18:13
基于模糊PD算法的三自由度机械臂遥操作双边控制_邱恒
2017-01-21 12:16
针对目前手动调整卫星姿态运动仿真设备气浮台时,调节时间过长而且平台浮起部分摆动周期过短的问题,提出了三自由度气浮台自动平衡技术。本文重点推导了三自由度气浮台
2010-01-18 13:52
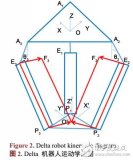
为了解决三自由度Delta机器人工作空间的仿真问题,在总结已有的Delta机器人工作空间仿真方法的基础上,基于Matlab和Catia提出了三种具有代表性的Delta机器人工作空间仿真方法,以实验室
2018-01-05 16:13
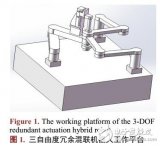
对机器人进行相应的优化设计可以使机器人具有更好的结构性能与工作性能。以一种三自由度冗余驱动混联机器人为研究对象,对该机器人尺寸参数无量纲化并分析该机器人可达的工作空间,进而在混联机器人工作空间中找出
2018-01-05 14:24
永磁转子偏转式三自由度电机电磁系统的建模与分析_李争
2017-01-08 12:03
基于牛顿欧拉法,针对一种采用非对称液压缸构建的新型三自由度并联机构进行了完整的动力学建模,为该机构结构优化打下基础。运用非对称阀控制非对称缸负载匹配理论,给出了一定结构参数和运动性能要求下的负载轨迹、最佳负载匹配曲线以及相关液压参数,为液压元件的选型提供设计依据。
2018-03-26 11:15

对接控制设备仿真试验失重状态模拟三自由度气浮平台是为某空间对接控制设备的全物理仿真模拟验证试验设计的。通过对平台气浮功能及运动功能的设计,确定了气控系统工作原理及元件选型;在结构方面,注重运动的平稳
2018-03-01 10:25
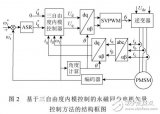
针对传统内模控制方法不能兼顾系统跟随性、抗干扰性和鲁棒性的问题,提出了一种基于三自由度内模控制的永磁同步电机矢量控制方法。该方法基于永磁同步电机矢量控制系统,分析了系统实现稳定性和鲁棒性的条件,根据
2017-12-29 16:27
针对三自由度并联气动柔性执行器的工作空间计算问题,对其T作空间的计算方法和评价标准进行了研究。对该类利用柔性结构和压缩空气实现运动的新型执行器进行了运动学分析。通过对其3个气动柔性元件以及两个圆盘
2018-03-13 10:39